Trajectory tracking control driving system for unmanned vehicle
An unmanned vehicle and trajectory tracking technology, which is applied in control/adjustment system, vehicle position/route/height control, non-electric variable control, etc., can solve problems such as difficult to meet commercialization, poor tracking accuracy, etc., to improve safety performance, improve positioning accuracy, and improve real-time effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
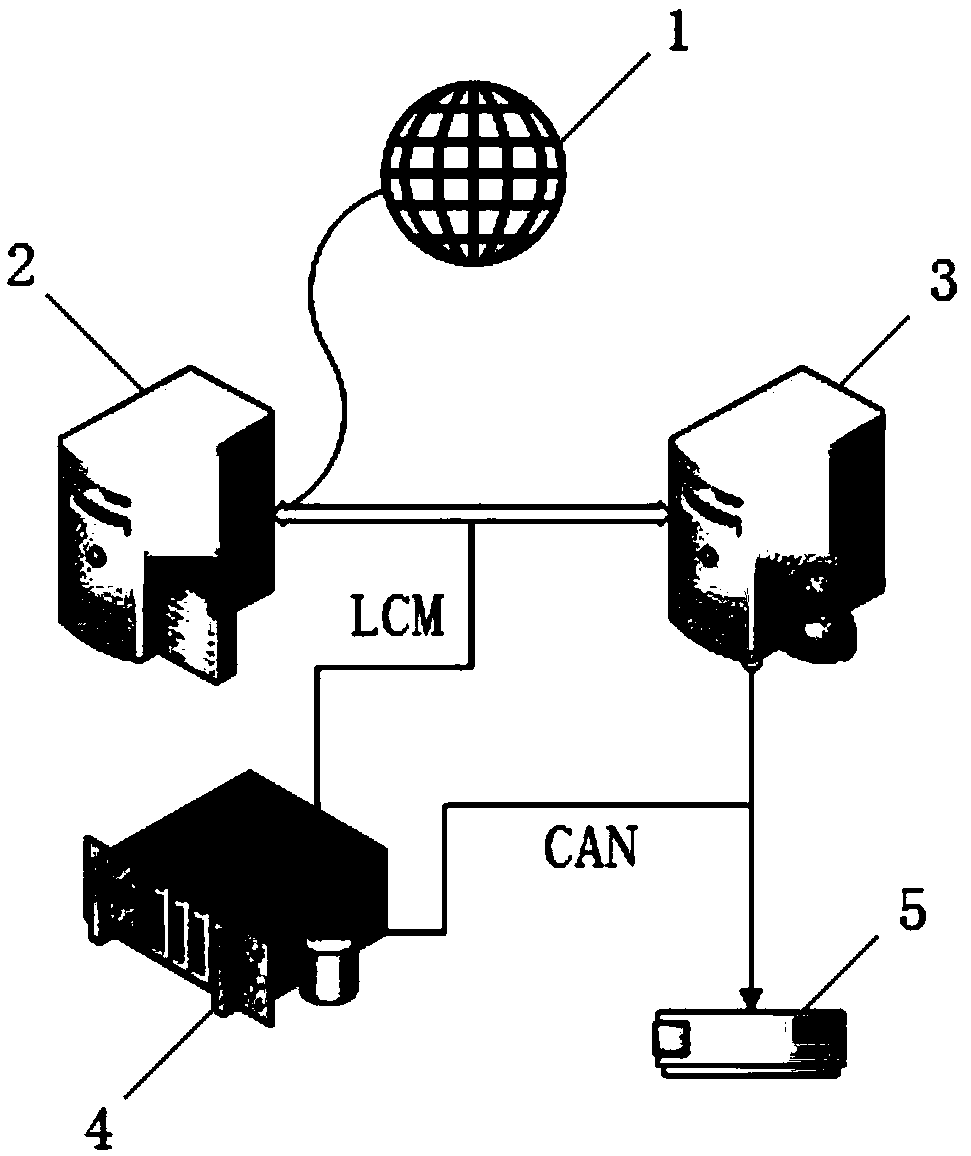
[0026] Such as figure 2 As shown, the working process of a kind of unmanned vehicle trajectory tracking control driving system provided by the present invention is as follows:
[0027] Collect a high-precision map based on the GPS / INS system. When the unmanned vehicle traces on this map, locate the current position information of the vehicle according to GPS / INS; collect vehicle status information such as the engine, accelerator, brake, etc. in the vehicle through the CAN bus; The above information is analyzed by the industrial computer and communicated with the computing unit microcomputer using LCM; the computing unit microcomputer generates control commands through the trajectory tracking control algorithm and sends them to the industrial computer, and then communicates to the vehicle execution unit through CAN communication to realize the trajectory of the unmanned vehicle track control.
[0028] The trajectory tracking control algorithm mainly adopts the feedforward-fee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com