Wheel-legged advancing-type robot
A traveling, robotic technology, applied in the field of robotics, can solve problems such as not amphibious robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
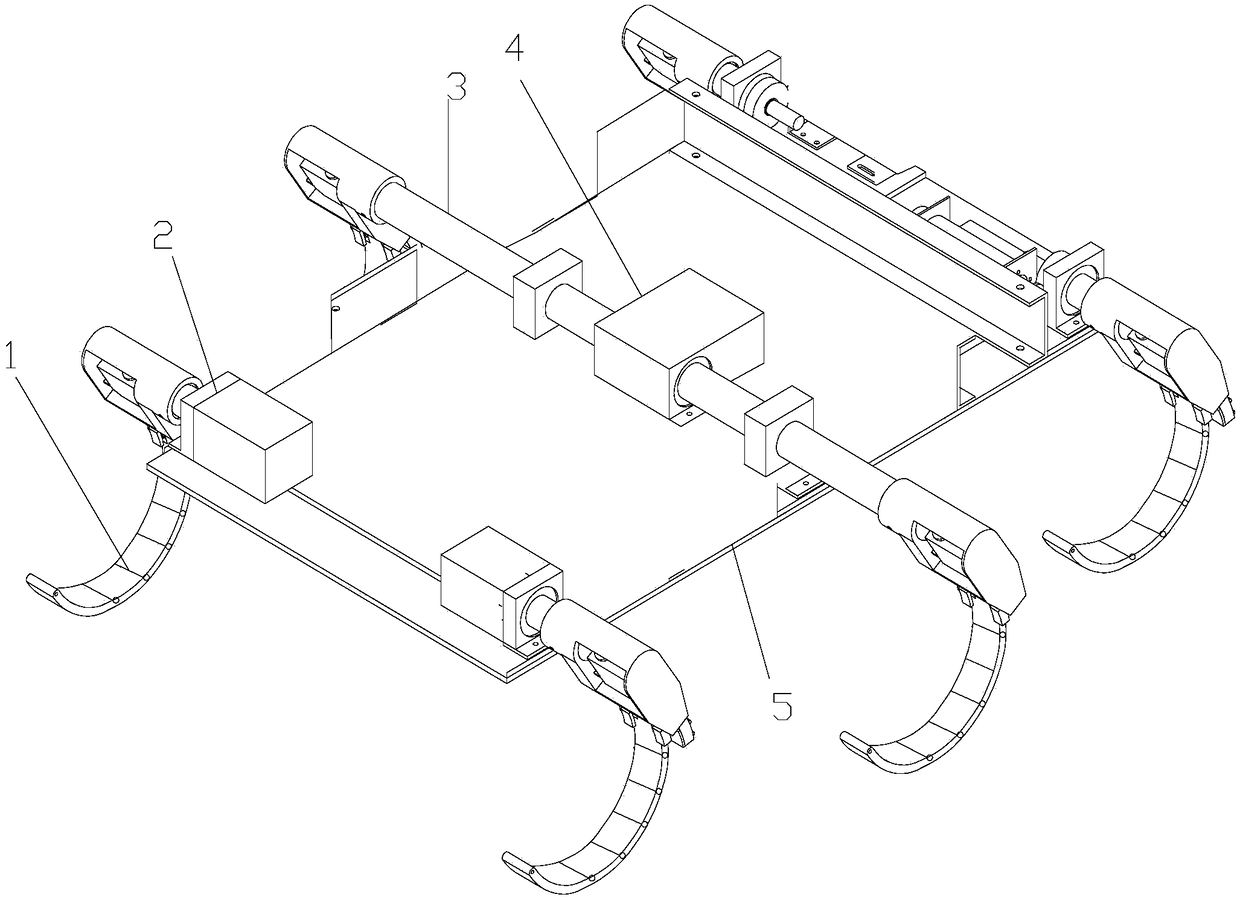
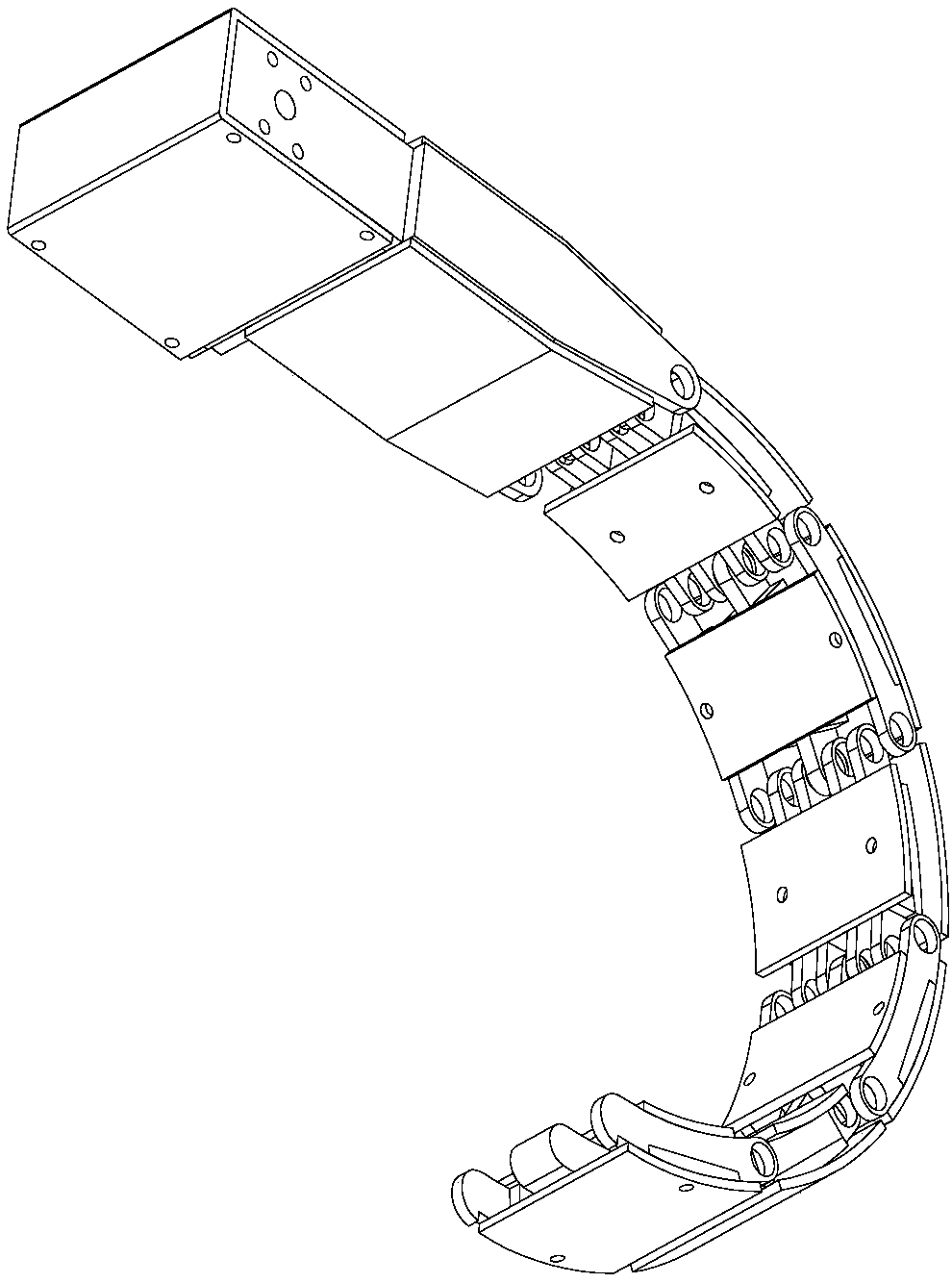
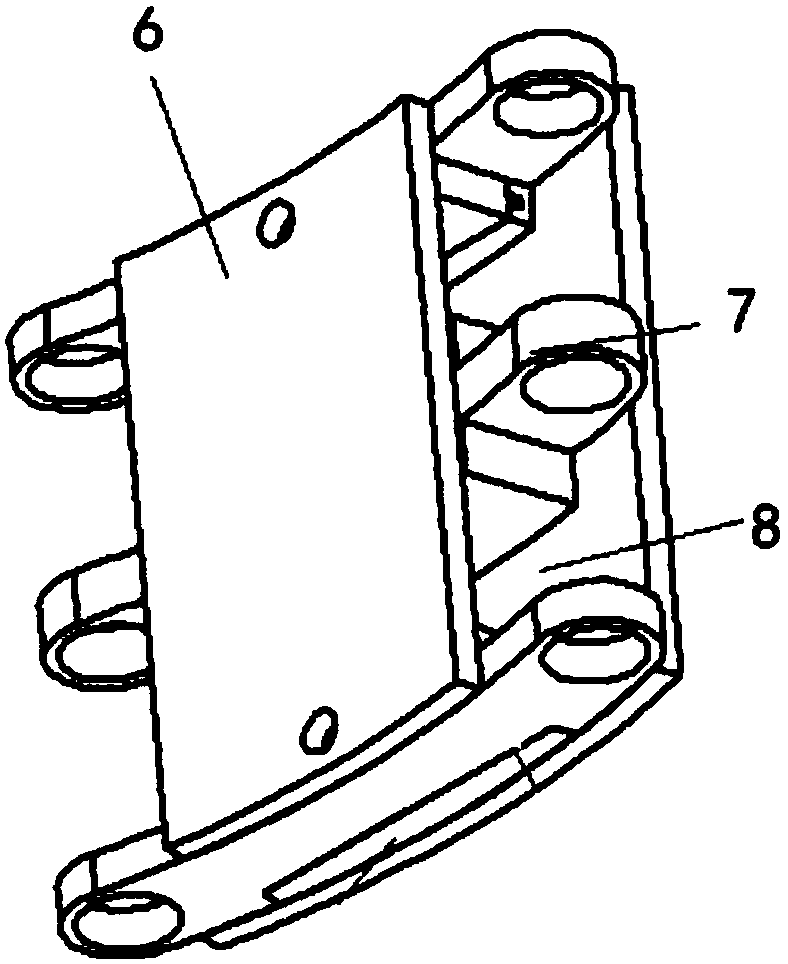
[0017] As shown in the figure: the walking robot with wheel legs 1 in this embodiment includes a fuselage 5, a plurality of wheel legs 1 arranged on the body 5 and a drive motor for driving the wheel legs 1 to rotate; Described wheel leg 1 comprises the deformation leg of chain structure and is used for driving the deformation mechanism of described deformation leg deformation; Shaped chute 8; the deformation mechanism includes a slider chain 7 hinged sequentially by a plurality of arc-shaped sliders and a cylinder 11 for driving the slider chain 7 to reciprocate in the arc-shaped chute 8 of the deformed leg A torsion spring for keeping the deformed legs straight is arranged between two adjacent deformed joints 6; the wheel leg 1 traveling robot of the present embodiment drives the wheel leg 1 to rotate to realize the advancement, and the slider chain 7 Driven by the cylinder 11, it can slide in the arc-shaped chute 8 of the deformed leg. When the hinge shaft of the slider cha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com