A UAV formation performance system based on uwb positioning and its implementation method
An implementation method and a technology of drone formation, which is applied in the field of UWB positioning-based drone formation performance system, can solve the problems that cannot meet the requirements of drone formation performance, are too large to carry micro-UAVs, and the positioning system is expensive.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The following specific implementation methods will further illustrate the present invention.
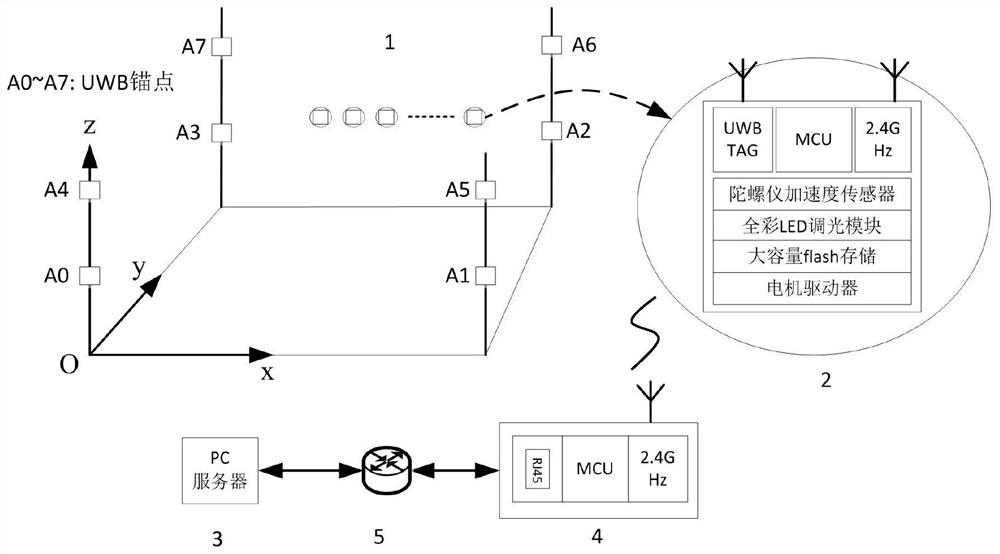
[0041] Such as figure 1 As shown, the UWB positioning-based UAV formation performance system embodiment is provided with a UWB three-dimensional positioning subsystem 1, a micro air vehicle subsystem 2, a formation navigation subsystem 3, a coordinator 4 and a router 5;
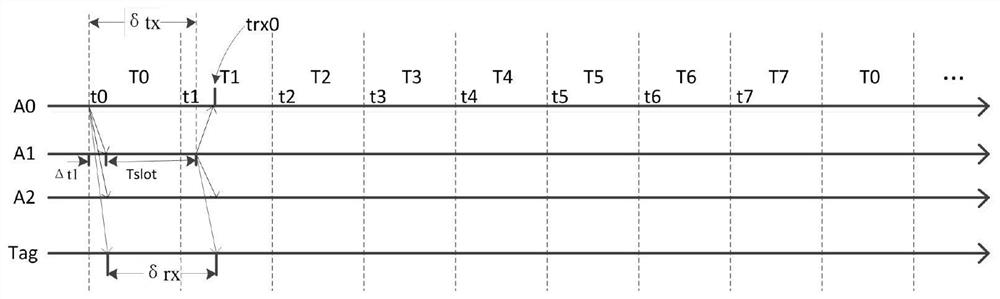
[0042] The UWB three-dimensional positioning subsystem 1 is composed of 8 positioning anchor points A0-A7 based on the ultra-wideband wireless transceiver module. T7 cyclically sends positioning signals;
[0043] The MAV subsystem is composed of Cortex M4 MCU, gyroscope acceleration sensor, motor driver, UWBTag, 2.4GHz communication module, full-color LED dimming module and large-capacity flash memory;
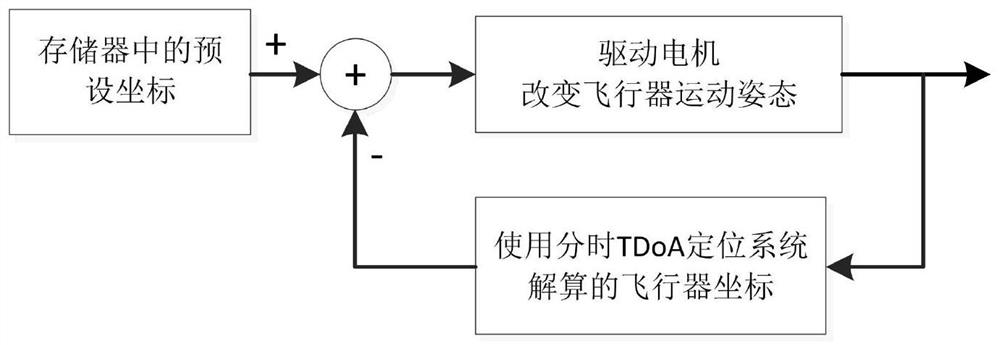
[0044] The formation navigation subsystem 3 simulates the flight pattern of the micro-aircraft cluster by computer, and adopts the distributed storage technology of the flight pattern;
[0045] Described c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com