Climbing robot for nuclear power pipeline detection and maintenance and operation method
A pipeline detection and robot technology, applied in the field of climbing equipment, can solve problems such as poor adaptability, inability to adapt to climbing requirements, unstable operation, etc., and achieve the effect of preventing separation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
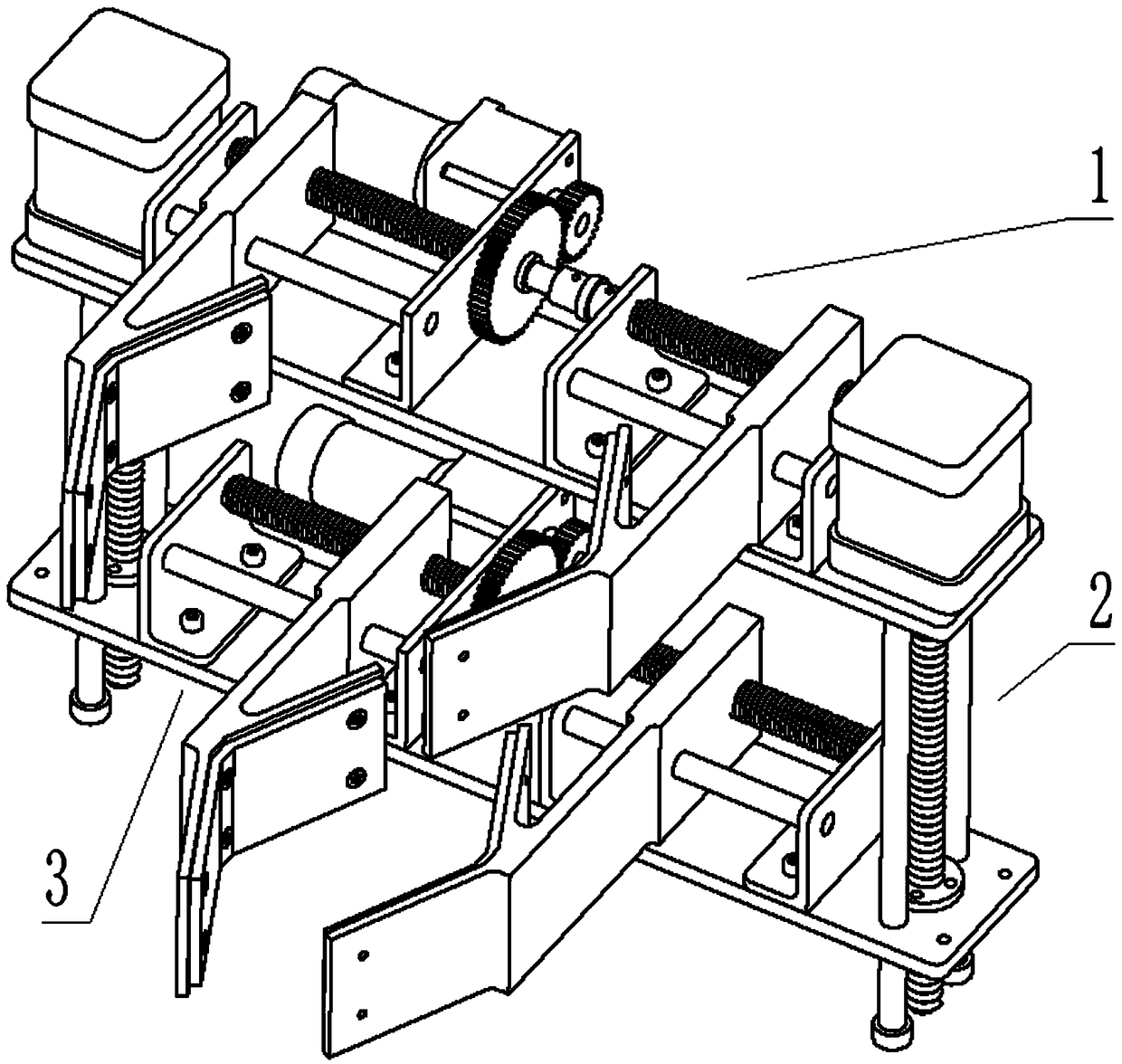
[0036] Such as Figure 1-3 , a climbing robot used for inspection and maintenance of nuclear power pipelines, which includes an upper clamping mechanism 1 and a lower clamping mechanism 3 for clamping the pipeline, and the upper clamping mechanism 1 and the lower clamping mechanism 3 are connected by a The lifting mechanism 2 that drives its lifting is connected. The upper clamping mechanism 1 and the lower clamping mechanism 3 adopt the same structure. The above-mentioned climbing robot can be used for inspection and maintenance of nuclear power pipelines. During the working process, by remotely controlling the above-mentioned robots, the nuclear power pipelines can be smoothly climbed, thereby ensuring the safety of operators.
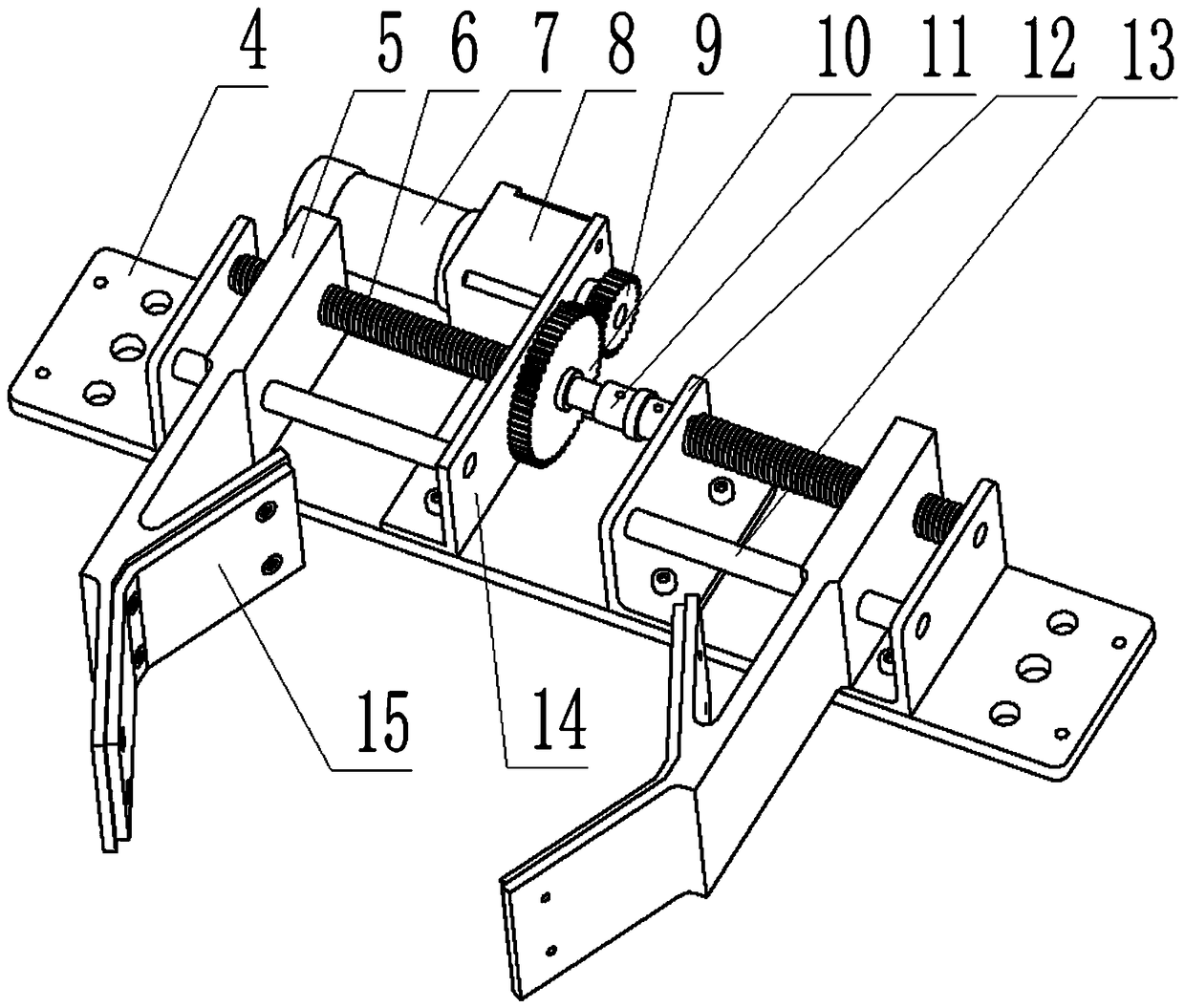
[0037] Further, the upper clamping mechanism 1 includes a base plate 4, on which a motor connecting plate 14 and a plurality of L-shaped connecting plates 12 are fixedly installed, and two wires are supported and installed between the L-shaped conne...
Embodiment 2
[0044] Any one of the operation methods for nuclear power pipeline inspection and maintenance climbing robot, it includes the following steps:
[0045] Step1: In the initial state, the splints 5 of the upper clamping mechanism 1 and the lower clamping mechanism 3 of the robot clamp the pipe, and the distance between the upper clamping mechanism 1 and the lower clamping mechanism 3 is the closest within the adjustment range of the lifting mechanism 2, and then execute The following steps;
[0046] Step2: The motor 7 in the upper clamping mechanism 1 reverses, drives the reducer 8 to drive the driving gear 9 to rotate, and drives the driven gear 10 to rotate through gear meshing. Since the driven gear 10 is installed on the two screw shafts 6, the two screw The bars are connected by a coupling 11, and the two threads are opposite, and the two splints 5 move toward each other to loosen the pipeline to be inspected;
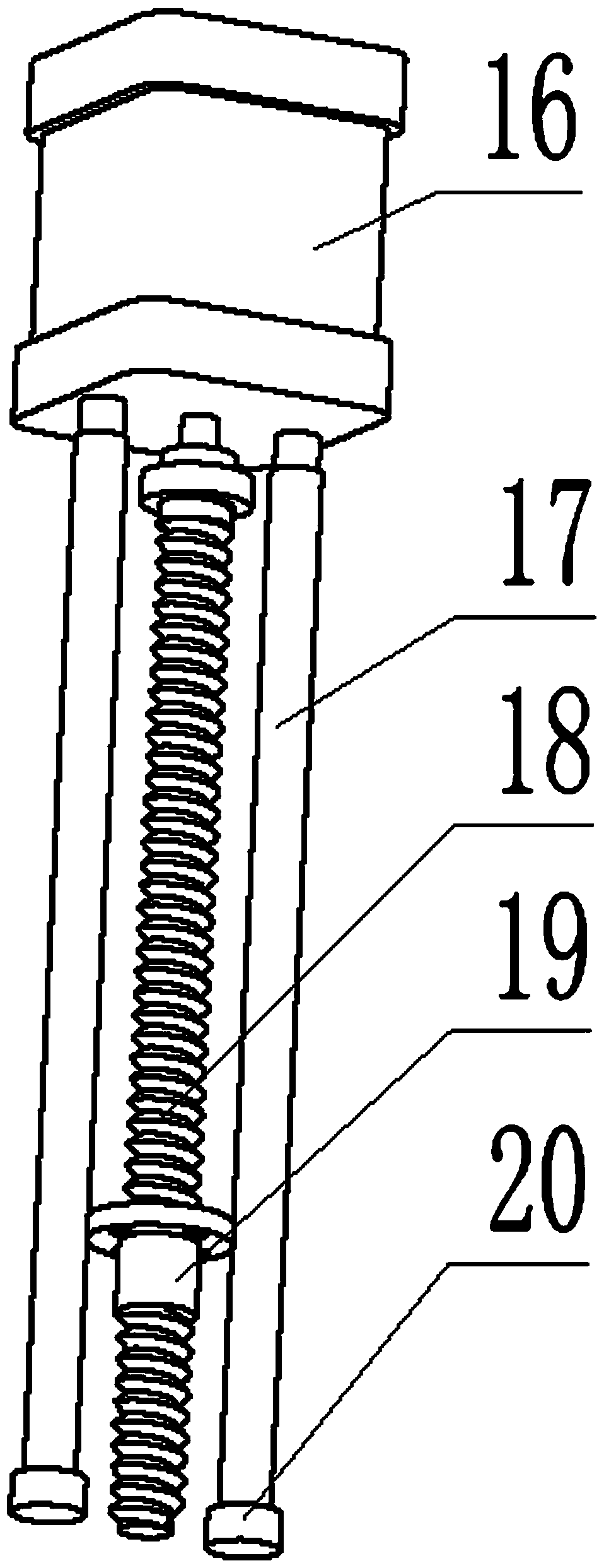
[0047] Step3: The stepper motor 16 in the lifting mechanism 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com