Method and system for measuring parameters of pantilt and lens camera system based on resection measurement
A technology of resection and system parameters, applied in the direction of measuring devices, instruments, etc., can solve the problems of high-throughput 3D point cloud environment of field plants, lack of high-throughput plant phenotyping equipment, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
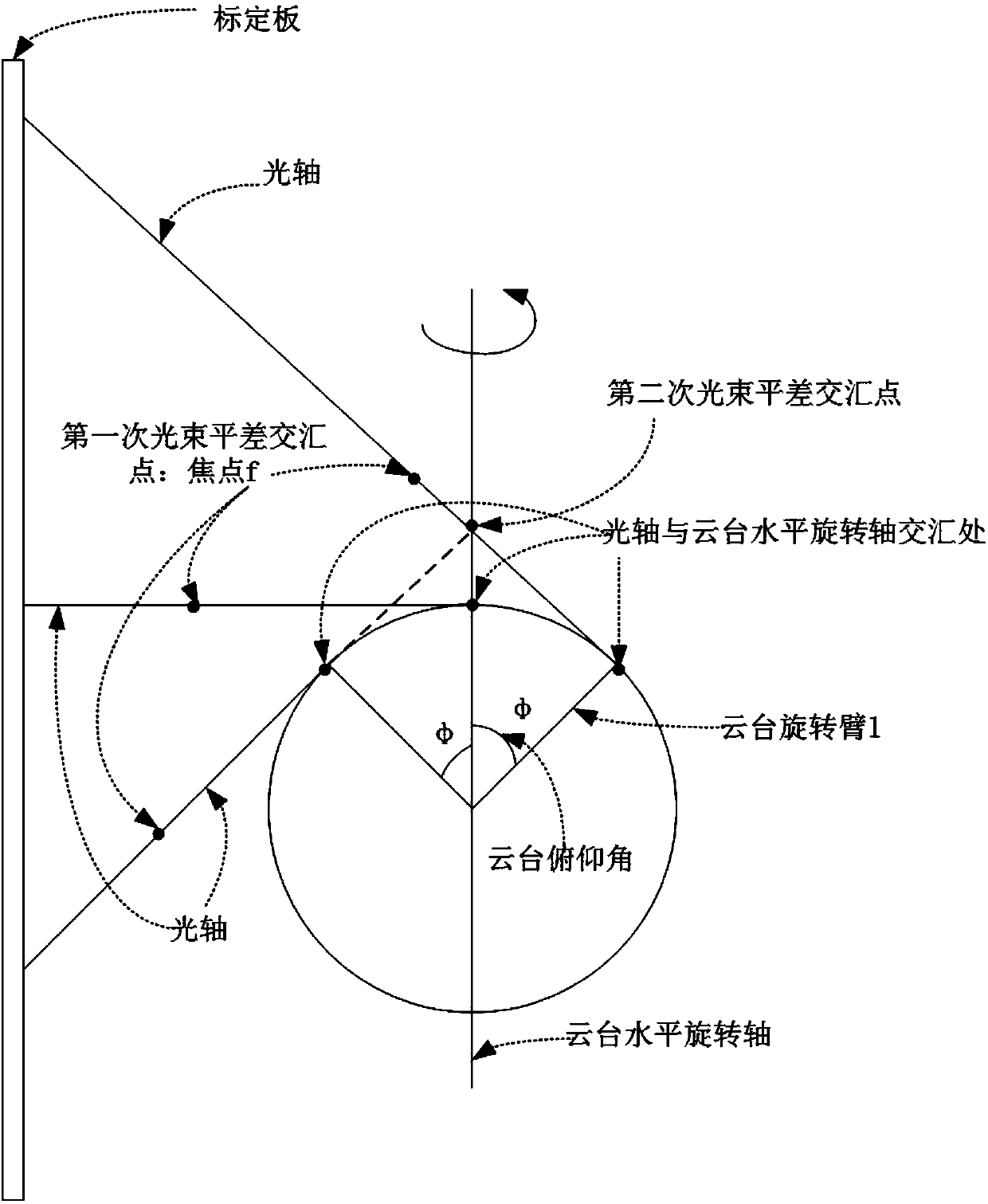
[0152] figure 1 It is a schematic diagram of the cloud mirror photography system based on resection in the present invention, figure 2 show
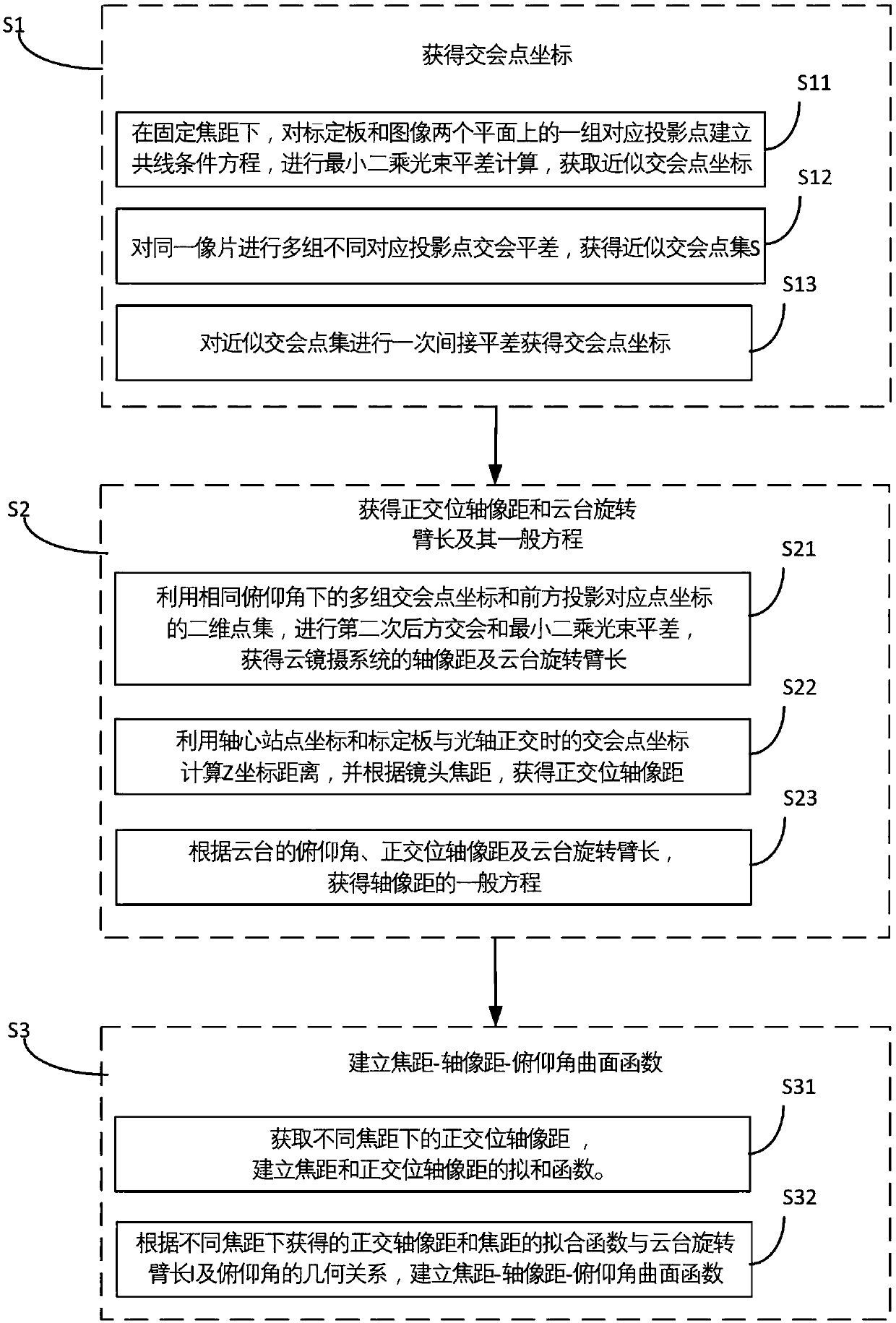
[0153] A method for measuring parameters of a cloud-mirror camera system based on resection, comprising the following steps:
[0154] S1. Using multiple sets of intersection point coordinates obtained from the same photo and corresponding point coordinates in the forward projection under a fixed focal length, correct systematic errors and accidental errors, and obtain intersection point coordinates;
[0155] S2. Obtain the coordinates of the intersection point with the same pitch angle and the two-dimensional point set of the corresponding point coordinates of the forward projection, perform the second resection and least squares beam adjustment on it, and obtain the axial image distance and the rotating arm of the cloud mirror camera system length and its general equation;
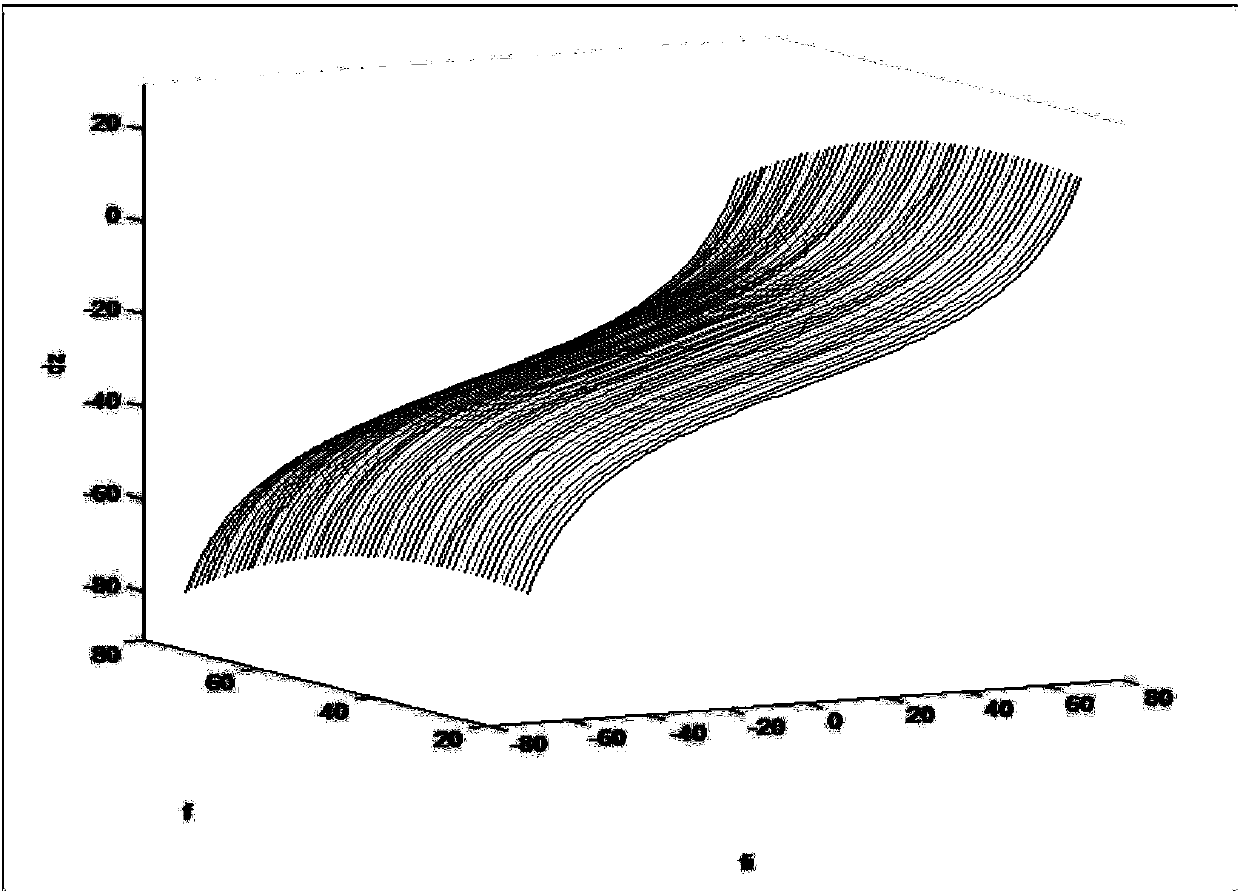
[0156] S3. Establishing a focal length-axis image distance...
Embodiment 2
[0230] Figure 4 It shows a parameter measurement system of cloud-mirror photography system based on resection, which adopts the method described in Embodiment 1, and includes an intersection point coordinate acquisition module, an axial image distance and a rotating arm length acquisition module, a focal length-axial image A distance-pitch angle surface function building module;
[0231] The intersection point coordinate acquisition module is used to obtain multiple sets of intersection point coordinates and front projection corresponding point coordinates, through error correction, to obtain accurate intersection point coordinates; Establish a collinear conditional equation corresponding to the projection point, perform least squares beam adjustment calculation, and obtain approximate intersection point coordinates
[0232] Specifically include:
[0233] Build the error equation:
[0234] In the formula:
[0235] V=[v x ,v y ] T
[0236]
[0237]
[0238] L...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com