A hierarchical cooperative control method for suborbital swarm vehicles
A control method and collaborative control technology, applied in three-dimensional position/course control, control/regulation system, non-electric variable control, etc., can solve the problem of data volume and control algorithm complexity, high performance pressure of missile-borne computer, and low calculation efficiency Advanced problems, to achieve the effect of reducing the amount of data and the complexity of the control algorithm, the structure is simple, and the calculation efficiency is improved
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
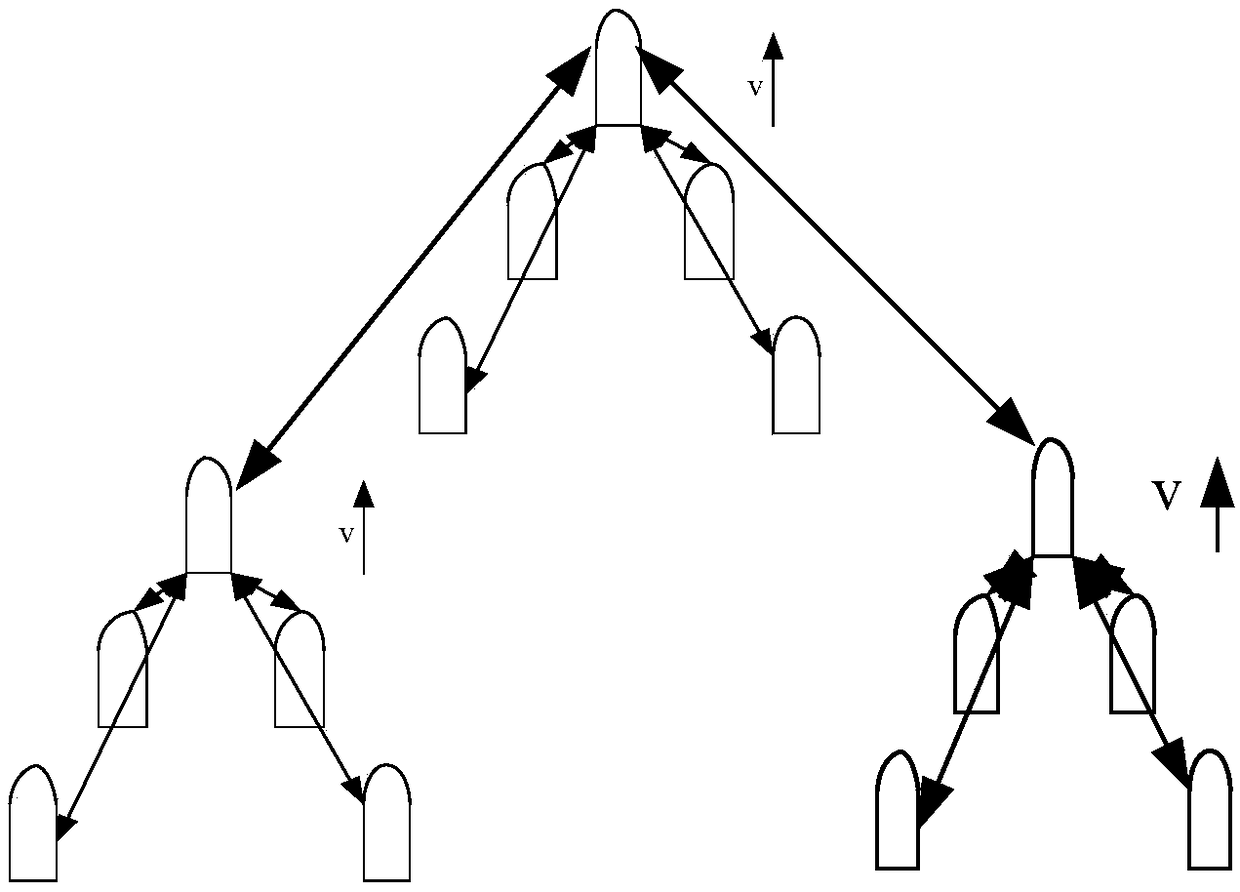
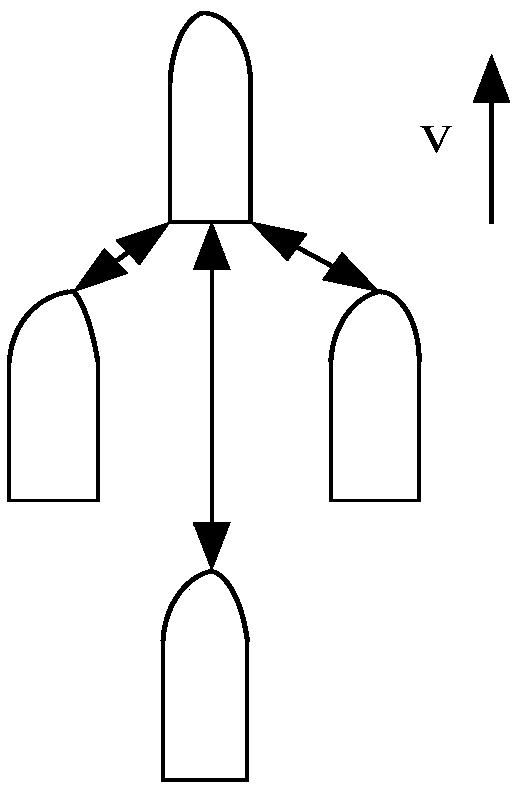
[0044] Specific implementation mode one: the following combination figure 1 Describe the present embodiment, the hierarchical cooperative control method of the suborbital swarm aircraft described in the present embodiment, the control method adopts the formation control method of Leader-Follower, and all worker bee aircraft in the aircraft group are based on the queen bee aircraft, Fix the center of the relative coordinate system on the queen bee aircraft. All worker bee aircraft in the aircraft group take the coordinates of the queen bee aircraft in the relative coordinate system as the control reference. When each worker bee aircraft stabilizes near the required position, the formation required formation; all worker bee aircraft only interact with the queen bee aircraft and accept the control of the queen bee aircraft;
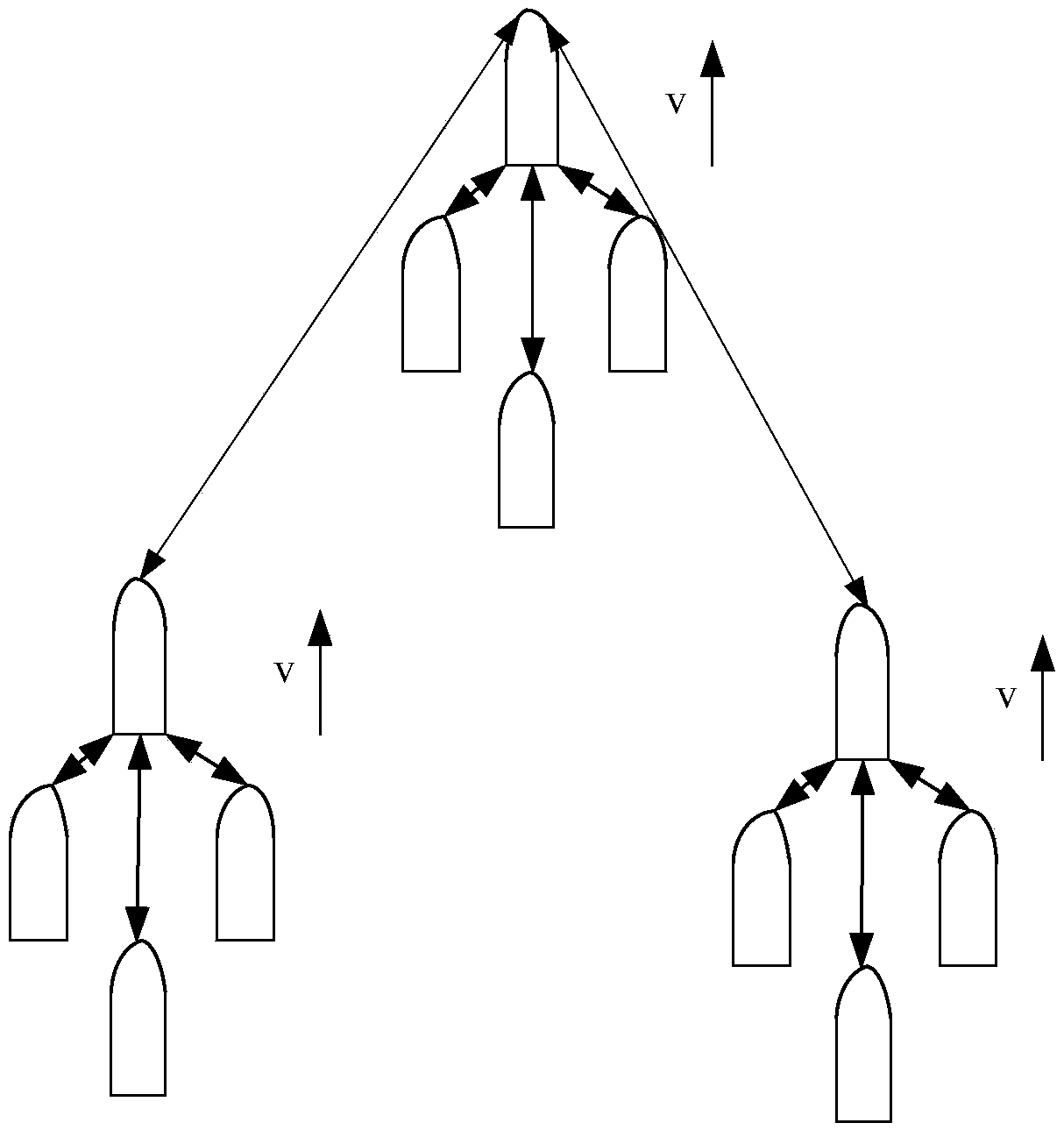
[0045] The large formation control method composed of a large number of aircraft adopts a layered formation control method, specifically a single-Leader lay...
specific Embodiment approach 2
[0051] Specific embodiment two: this embodiment is further described to embodiment one, and the working process of queen bee aircraft is:
[0052] The queen bee aircraft obtains absolute position information and communicates with the battlefield command system. The queen bee aircraft conducts unified management of formation, flight, and assignment of attack tasks.
specific Embodiment approach 3
[0053] Specific implementation mode three: this implementation mode further explains implementation mode one or two, and the working process of the worker bee aircraft is:
[0054] The worker bee aircraft is equipped with a relative position measuring device, which measures the position of the worker bee aircraft relative to the queen bee aircraft or the deputy queen bee aircraft, and obtains mission information from the queen bee aircraft or the deputy queen bee aircraft.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com