


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Implementation method of humanoid robot touch housing based on elastic wave recognition
A technology of a humanoid robot and its realization method, which is applied in the direction of instruments, data processing input/output process, electrical digital data processing, etc., can solve problems that do not conform to anthropomorphic instincts, and achieve the effect of enhancing the anthropomorphic effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0011] The present invention will be further described below in conjunction with the accompanying drawings.
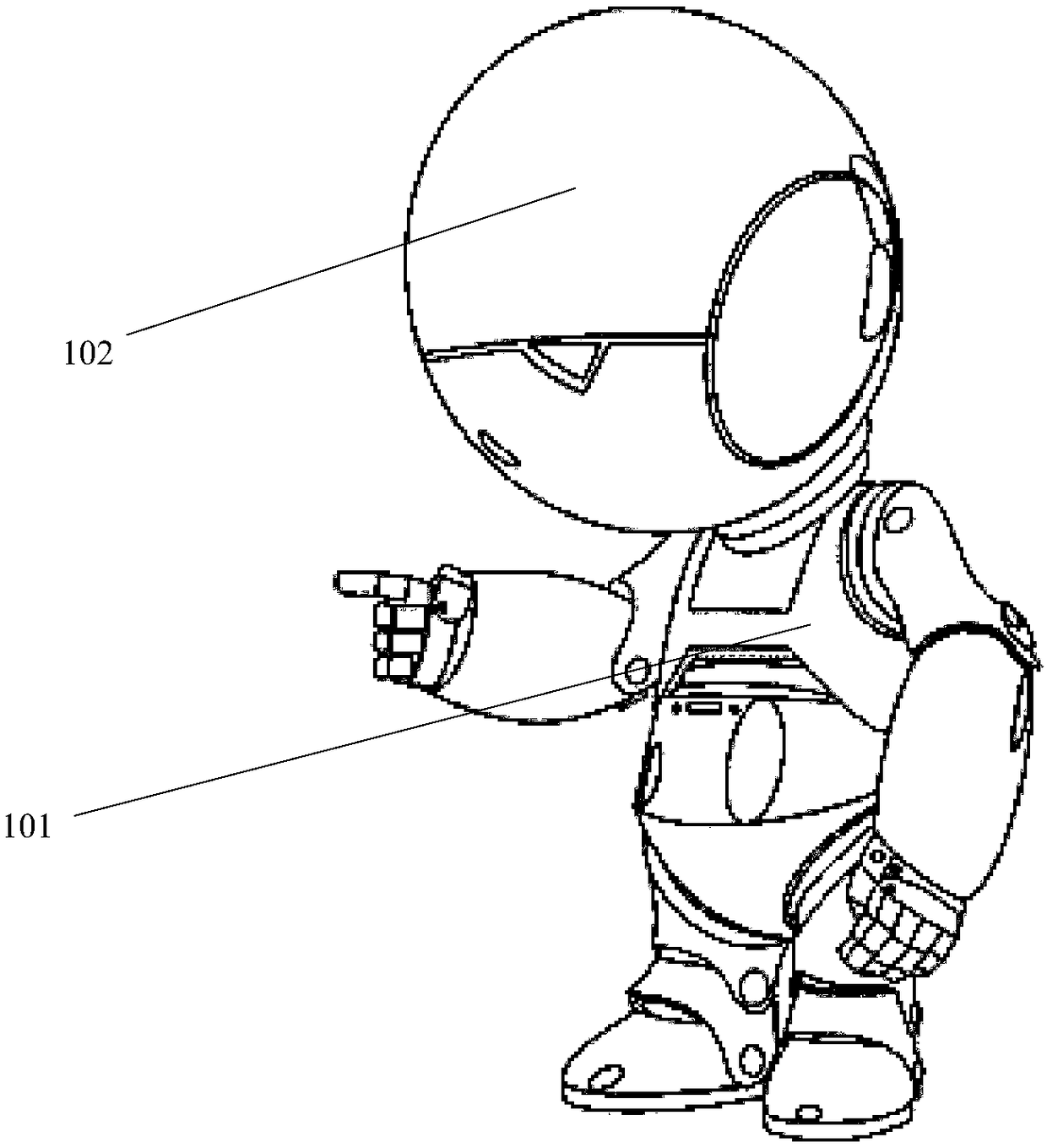
[0012] see figure 1 , the humanoid robot 101 involved in the present invention, its arc shell is mainly the back or head arc shell 102 .
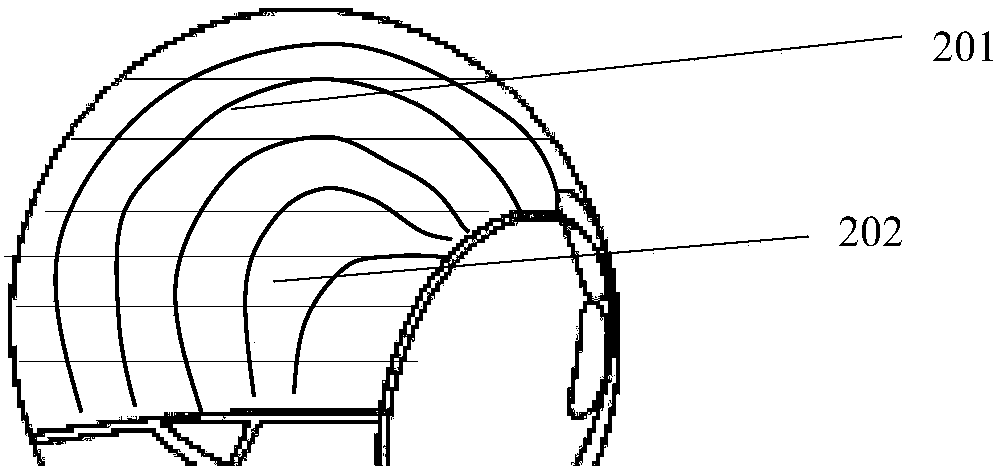
[0013] see Figure 2A , curved shell 201, in Figure 2B After the Mercator projection 202 partitioned projection, in Figure 2C A rectangular projection plane 203 is formed in the center, and four sets of elastic wave transducers 204 are distributed at four vertices of the rectangle 203 . The orientations of the four sets of transducers constitute the four vertices of the interactive working area and form a rectangular interactive area. Within this area, the time t1, t2, t3, and t4 of the vibration wave of the click and touch generated at (xr, yr) to reach different transducer groups are recorded and sent to the processing chip 205, which can be calculated by geometry Get location information (xr, yr). The transducers are all ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com