A Polarization Autonomous Integrated Navigation Method Based on Confidence
A technology of integrated navigation and confidence, which is applied in the field of integrated navigation, can solve the problems of difficulty in establishing a model, a small number of polarization sensors, and a small number of sensors, so as to improve robustness and anti-interference ability, avoid inaccurate measurement, and avoid sun damage. Accurate effect of vector information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0055] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0056] Such as figure 1 As shown, the specific implementation steps of a polarization autonomous integrated navigation method based on confidence in the present invention are as follows:
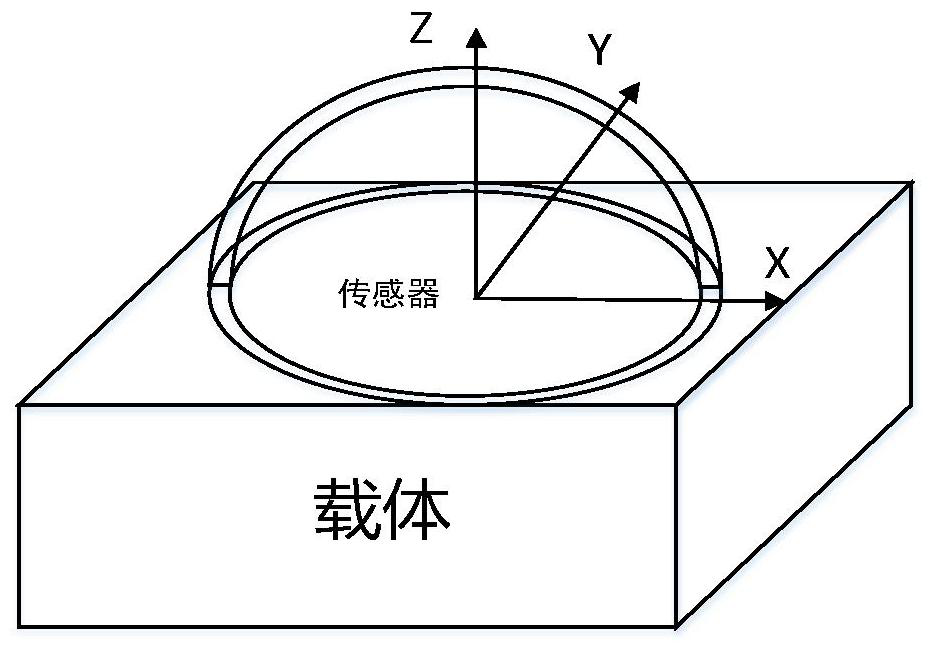
[0057] 1. In figure 2 The polarization sensor shown is installed on the carrier, and the module coordinate system is established based on the polarization sensor. The x-axis of the module coordinate system points to the right along the horizontal axis of the carrier, the y-axis points to the front of the carrier along the longitudinal axis of the carrier, and the z-axis points along the vertical axis of the carrier. Above the carrier, use N polarization sensors to obtain multiple polarization azimuth angles Then the polarization vector under the module system is as follows image 3 As shown, where E1...E10 is the polarization vector, its expression in th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com