


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Combined type robot car chassis
A robot and combined technology, applied in the direction of motor vehicles, vehicle parts, substructure, etc., can solve the problems of cumbersome and complex design, and achieve the effects of convenient teaching, reasonable structure and convenient assembly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
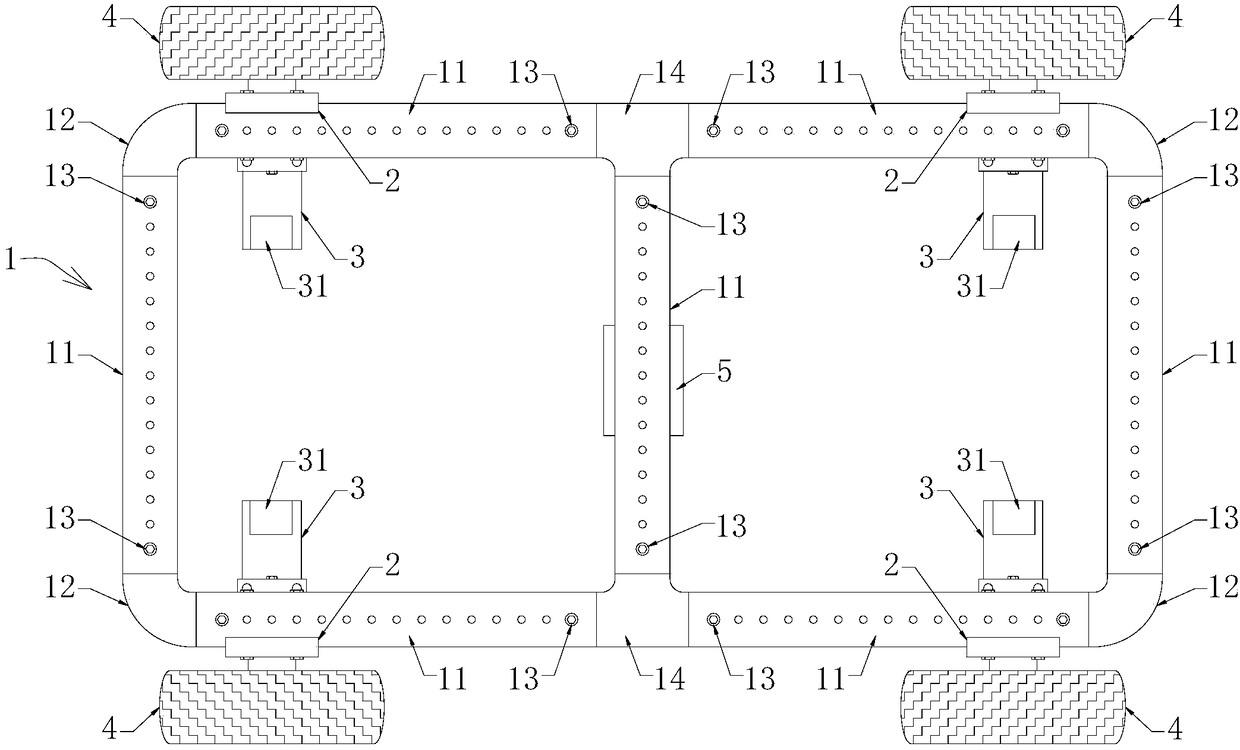
[0027] refer to figure 1 and figure 2 , the present invention implements a combined robot trolley chassis, including a chassis frame 1, a bracket 2, a motor 3 and wheels 4, and the chassis frame 1 is composed of several aluminum square tubes 11, a plurality of double-head connectors 12 and multiple A rectangular frame structure assembled from four fasteners 13, the double-head connector 12 is a 90° connector, and the chassis frame 1 also includes a three-head connector 14, and the three-head connector 14 is T-shaped structure, the two long sides of the chassis frame 1 are composed of two aluminum square tubes 11 and the three-head connector 14 connecting the two aluminum square tubes 11, and the three-head connector 14 on the two long sides An aluminum square tube 11 is connected, and a double-head connector 12 is connected to both ends of the two long sides, and the double-head connectors 12 corresponding to the two long sides are connected by an aluminum square tube 11. T...
Embodiment 2
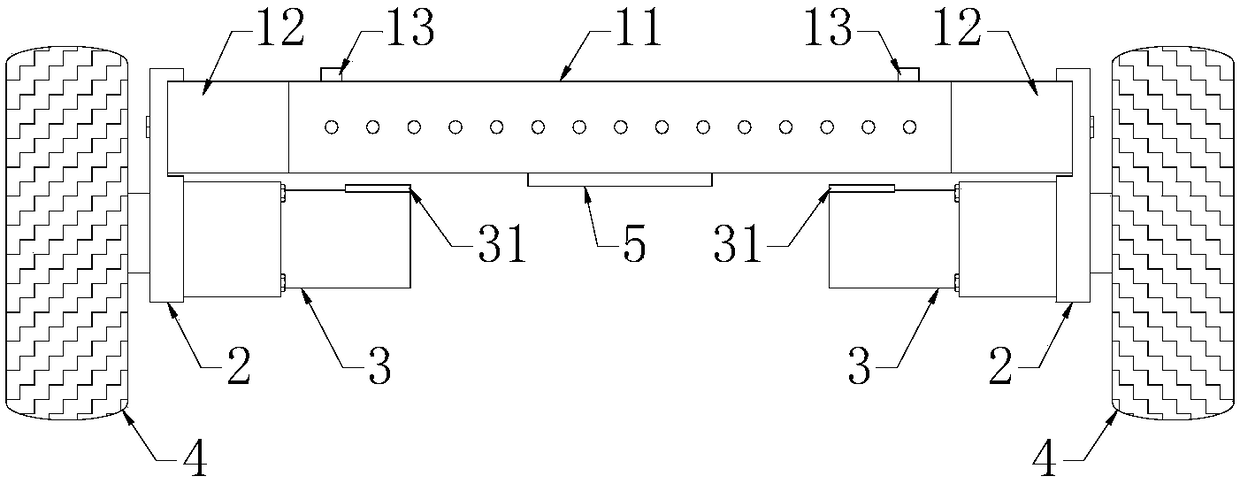
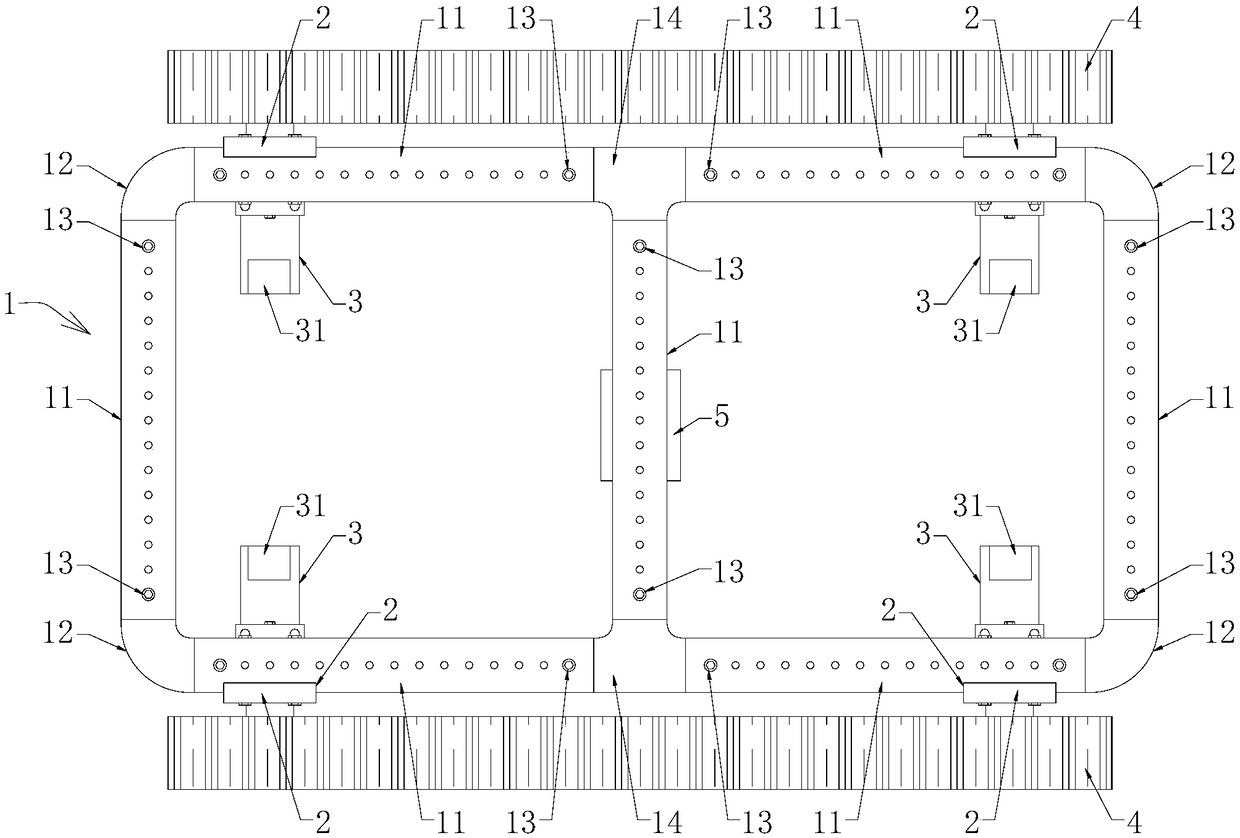
[0029] refer to image 3 and Figure 4 , the present invention implements a combined robot trolley chassis, including a chassis frame 1, a bracket 2, a motor 3 and wheels 4, and the chassis frame 1 is composed of several aluminum square tubes 11, a plurality of double-head connectors 12 and multiple A rectangular frame structure assembled from four fasteners 13, the double-head connector 12 is a 90° connector, and the chassis frame 1 also includes a three-head connector 14, and the three-head connector 14 is T-shaped structure, the two long sides of the chassis frame 1 are composed of two aluminum square tubes 11 and the three-head connector 14 connecting the two aluminum square tubes 11, and the three-head connector 14 on the two long sides An aluminum square tube 11 is connected, and a double-head connector 12 is connected to both ends of the two long sides, and the double-head connectors 12 corresponding to the two long sides are connected by an aluminum square tube 11. T...
Embodiment 3
[0031] refer to Figure 5 , the present invention implements a combined robot trolley chassis, including a chassis frame 1, a bracket 2, a motor 3 and wheels 4, and the chassis frame 1 is composed of several aluminum square tubes 11, a plurality of double-head connectors 12 and multiple A hexagonal frame structure assembled from four fasteners 13, the double-head connector 12 is an obtuse angle connector, and the chassis frame 1 also includes a short square tube 15, and each aluminum tube on the chassis frame 1 Both ends of the square tube 11 are connected with a double-head connector 12, and a short square tube 15 is connected between the double-head connectors 12 at the ends of two adjacent aluminum square tubes 11, and the short square tube 15 is connected to the aluminum square tube. The tubes 11 are only different in length, and the joints between the double-headed connectors 12, the aluminum square tube 11 and the short square tube 15 are locked and connected by fastener...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com