Double-motor dynamic suspension system of rehabilitation robot
A rehabilitation robot and dual-motor technology, which can be used in devices that help people walk, medical science, hospital beds, etc., can solve problems such as complex control, system vibration, system instability, etc., and achieve stable movement, precise height and force control , easy to wear effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0016] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, and the present invention includes but not limited to the following embodiments.
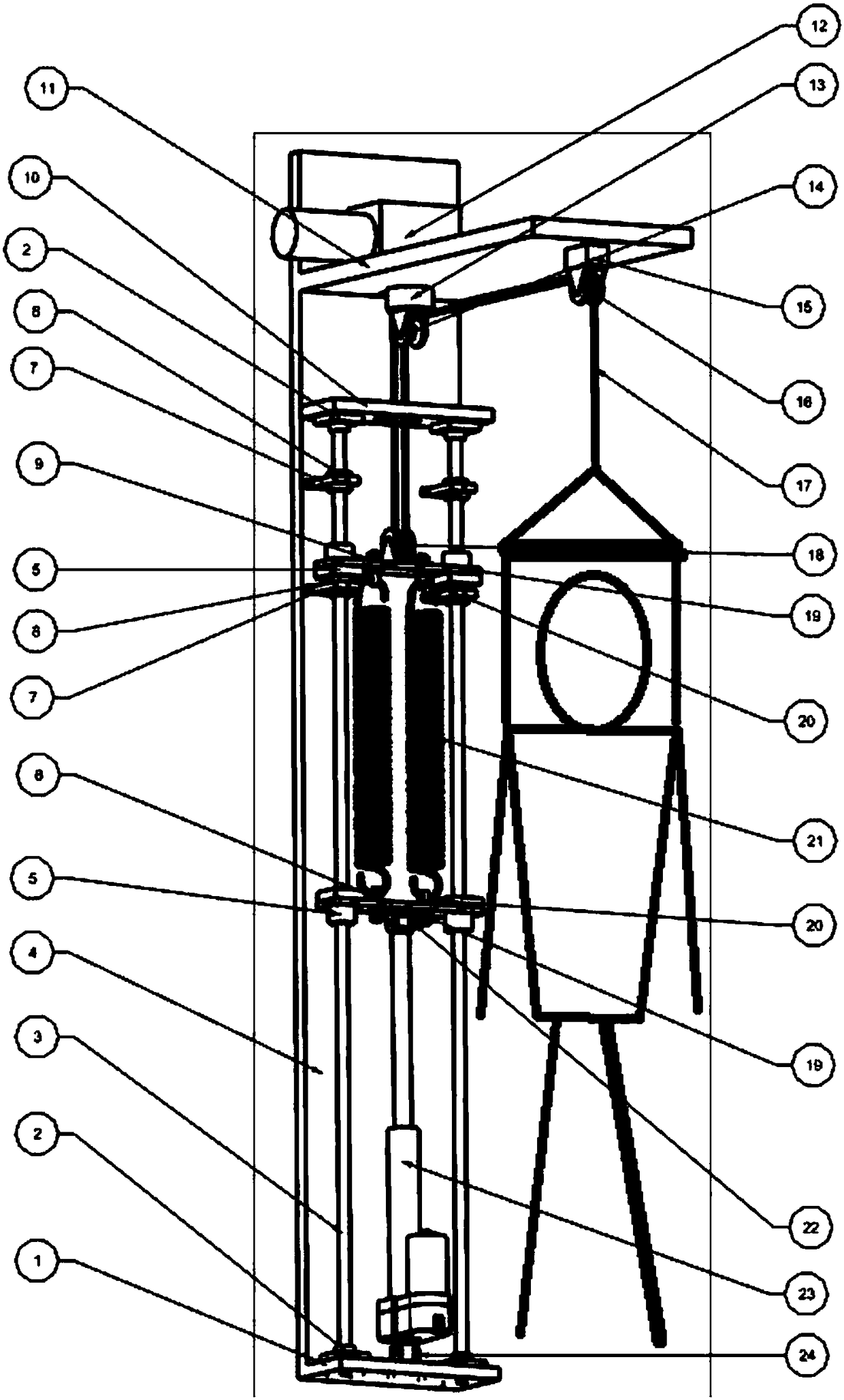
[0017] The rehabilitation robot dual-motor dynamic suspension system of the present invention consists of a lower support plate 1, a guide bearing bracket 2, an optical axis 3, a column 4, a linear bearing 5, a lower slider 6, a limit support 7, a vibration damping block 8, Upper slider 9, upper support plate 10, hanging plate 11, winch 12, force sensor 13, fixed pulley A14, proximity sensor 15, fixed pulley B16, rope 17, movable pulley 18, fixed nut 19, perforated bolt 20, tension spring 21. Earring A22, push rod 23, and earring B24.
[0018] The lower support plate 1 is fixedly connected to the lower end of the column 4, and the upper support plate 10 is fixedly connected to the upper end of the column 4. The height of the column 4 is 2 meters to 3 meters. Both ends of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com