Auxiliary obstacle avoidance method, apparatus and system for aircraft
An aircraft and obstacle avoidance technology, applied in the field of aircraft obstacle avoidance, can solve problems such as large distance measurement errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0050] This embodiment provides an aircraft assisted obstacle avoidance method, which is applied to an aircraft provided with multiple image acquisition devices and multiple distance sensors at various orientations of the fuselage. The aircraft may be a piloted aircraft or an unmanned aircraft such as, Figure 6 and Figure 7 aircraft shown. figure 1 A flow chart of the aircraft assisted obstacle avoidance method is shown, as figure 1 As shown, the method includes the following steps:
[0051] Step S101, receiving images captured simultaneously by multiple image capture devices.
[0052] During the flight of the aircraft, the vision processing module drives multiple image acquisition devices to simultaneously acquire images, and receives the images simultaneously acquired by the multiple image acquisition devices.
[0053] Step S102, combining multiple received images into a panoramic image around the aircraft.
[0054] Specifically, step S102 can be implemented by the fo...
Embodiment 2
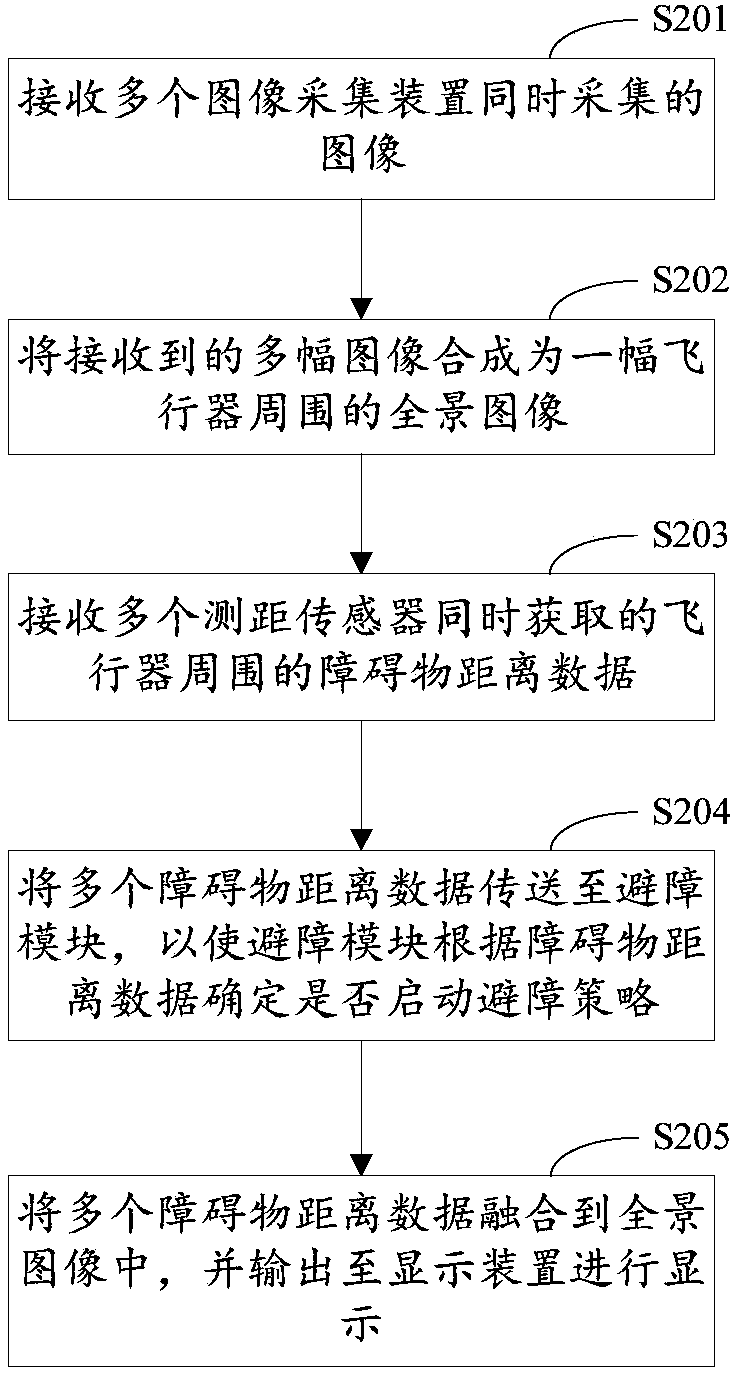
[0063] This embodiment provides another aircraft assisted obstacle avoidance method, and this method is also applied to an aircraft provided with multiple image acquisition devices and multiple distance sensors at various orientations of the fuselage. Such as figure 2 As shown, the method includes:
[0064] Step S201, receiving images simultaneously captured by multiple image capture devices.
[0065] Step S202, combining multiple received images into a panoramic image around the aircraft.
[0066] Considering that the images collected by the image acquisition device, especially the wide-angle camera, may be distorted, therefore, in this embodiment, the geometric distortion correction is performed on the received images before stitching the images to obtain a corrected image.
[0067] For example, for Figure 7 As shown in the aircraft provided with four image acquisition devices, the four image acquisition devices are respectively arranged at intervals of 90°, and the cor...
Embodiment 3
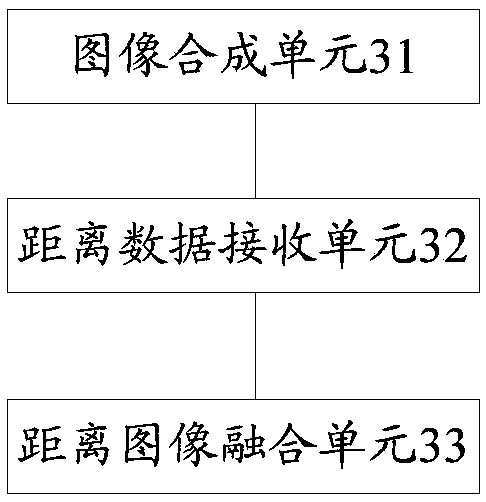
[0077] This embodiment provides an auxiliary obstacle avoidance device for an aircraft corresponding to the above-mentioned method embodiment, which is applied to an aircraft provided with multiple image acquisition devices and multiple distance sensors in various directions of the fuselage. image 3 A structural block diagram of the auxiliary obstacle avoidance device of the aircraft is shown, as image 3 As shown, the device includes:
[0078] An image synthesis unit 31, configured to receive images captured simultaneously by multiple image acquisition devices, and synthesize the received multiple images into a panoramic image around the aircraft;
[0079] The distance data receiving unit 32 is used to receive the obstacle distance data around the aircraft acquired by a plurality of distance sensors simultaneously;
[0080] The distance image fusion unit 33 is used to fuse a plurality of obstacle distance data into the panoramic image, and output it to the display device fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com