Robot navigation method based on global map and robot using navigation method to navigate
A global map and navigation method technology, applied in navigation, mapping and navigation, navigation calculation tools, etc., can solve problems such as inability to accurately measure spatial motion, large key frame errors, and image distortion.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
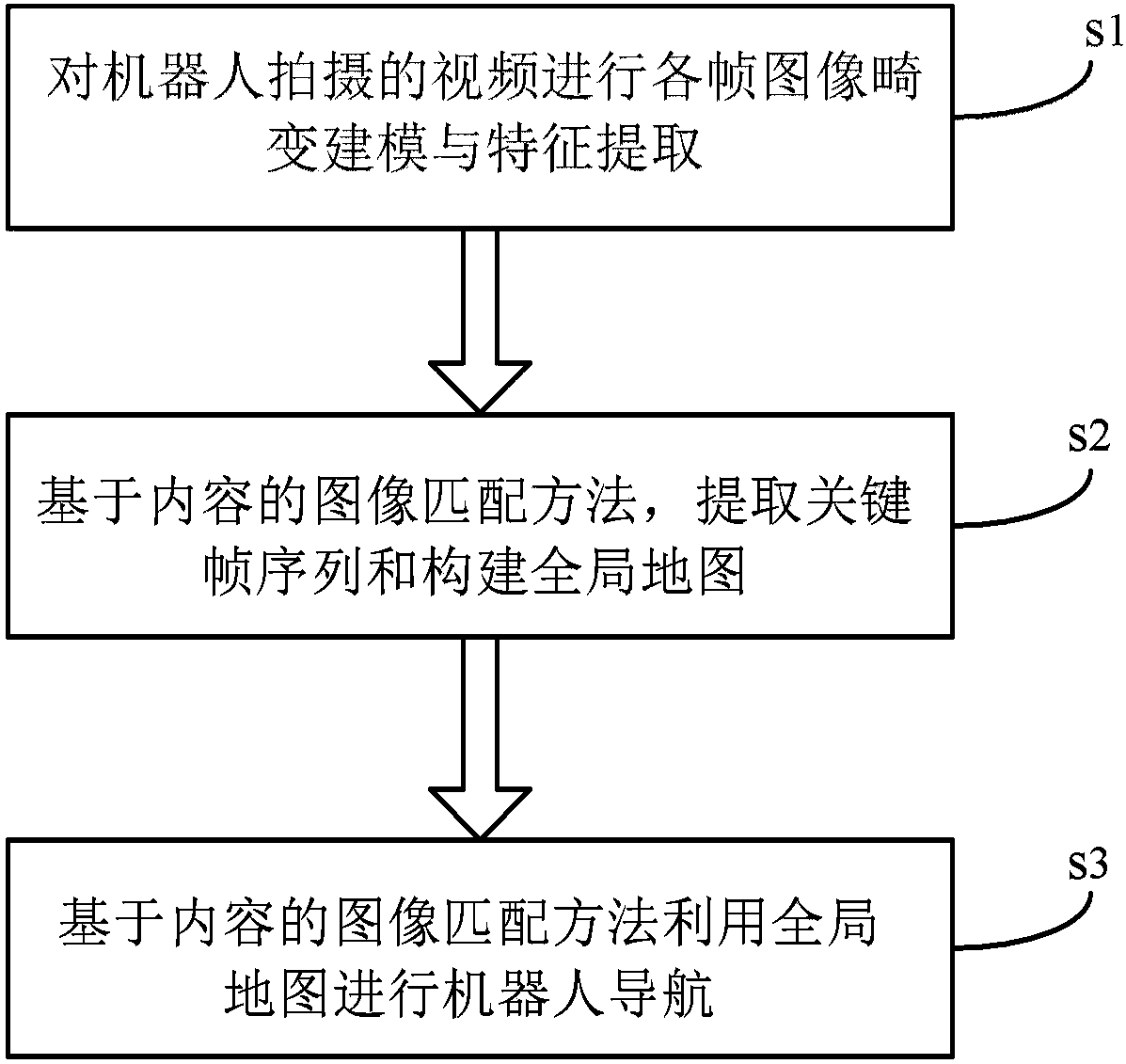
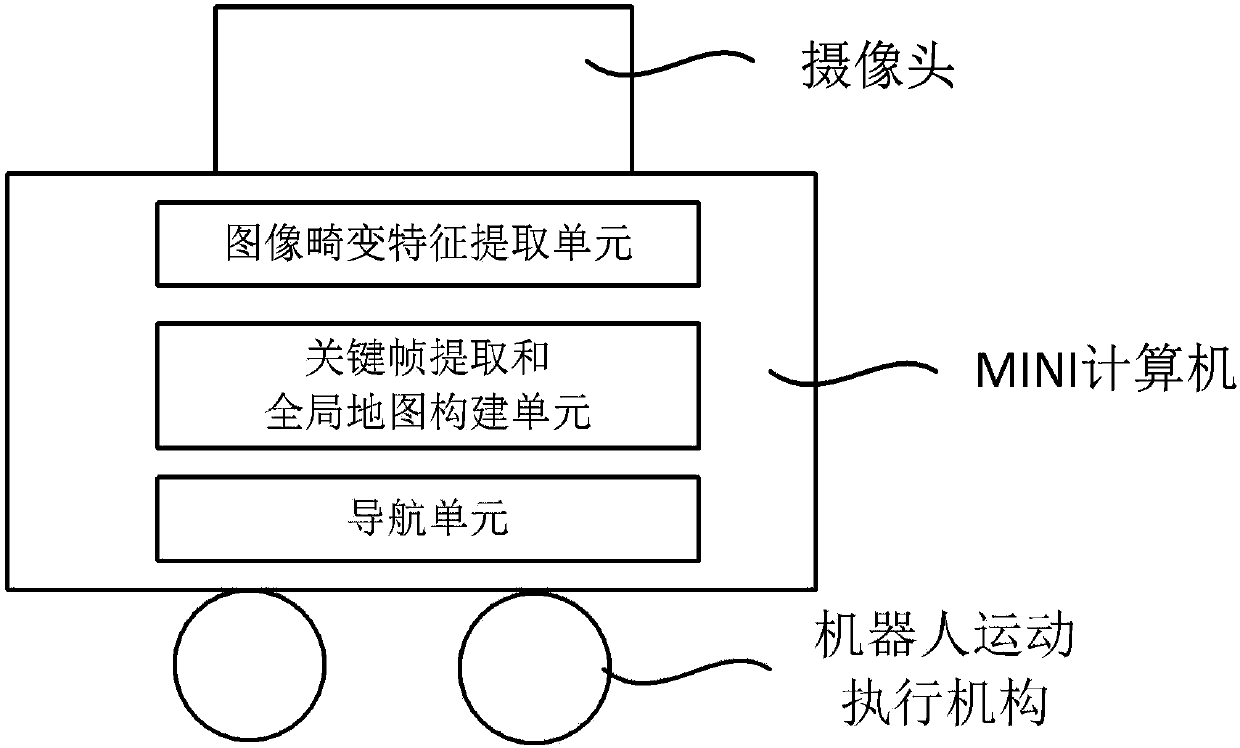
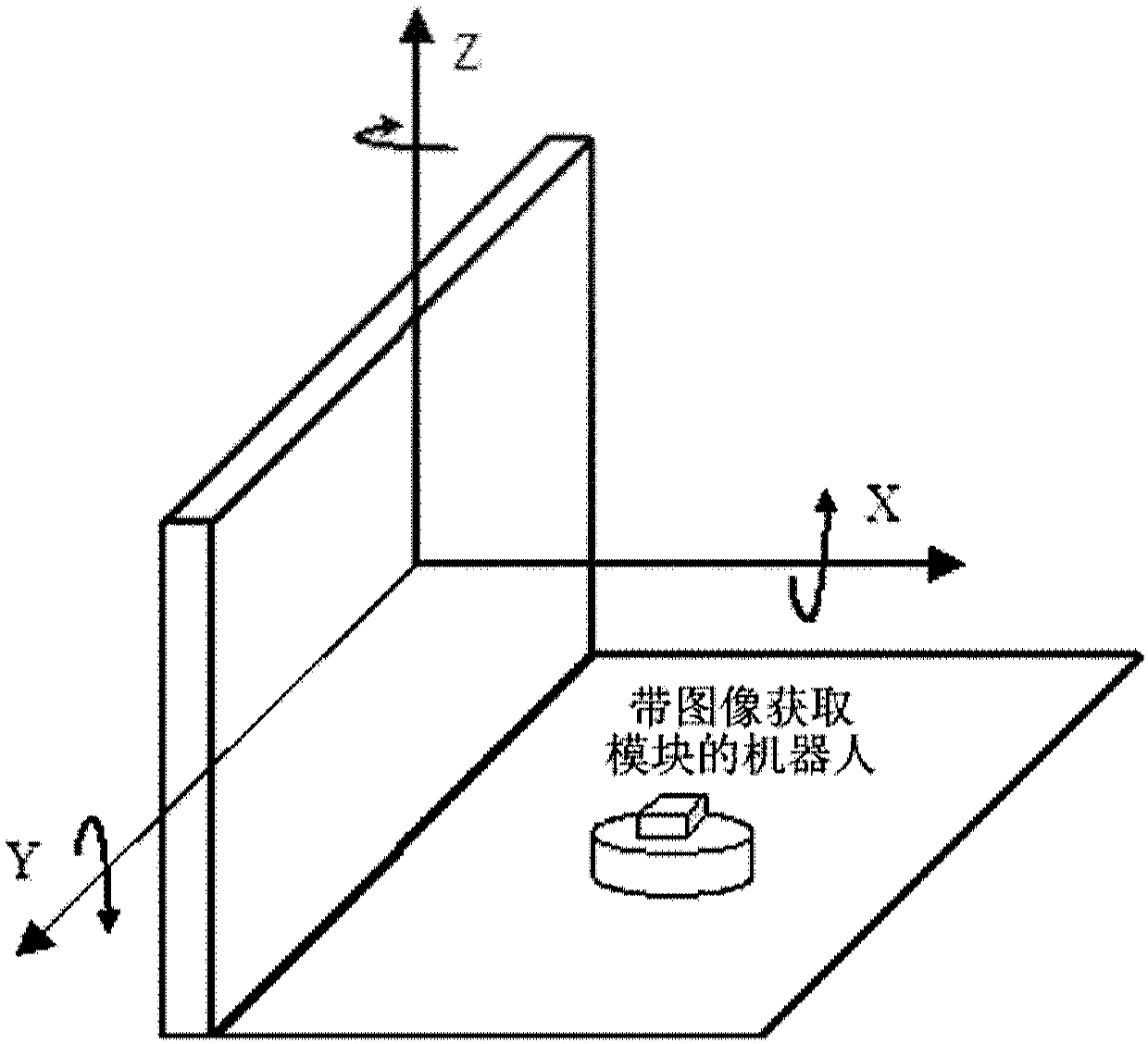
[0059] The present invention provides a robot navigation method based on a global map, which can make full use of the layout and shape information of various objects in the room, and automatically extract key frames with large spatial intervals but maintaining a certain overlap from the video captured by the robot The sequence can build a global map for the complex indoor environment of "multiple rooms + corridors", and the robot can achieve accurate autonomous positioning. The method of the invention is based on the robot vision camera that shoots vertically upwards, establishes the distortion model of the ceiling and the wall through the camera model, extracts their features, and establishes an image content matching met...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com