Single-connecting-rod flexible mechanical arm control method and system
A technology of flexible manipulators and control methods, applied in the field of robotics, can solve problems such as difficulty in obtaining model parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
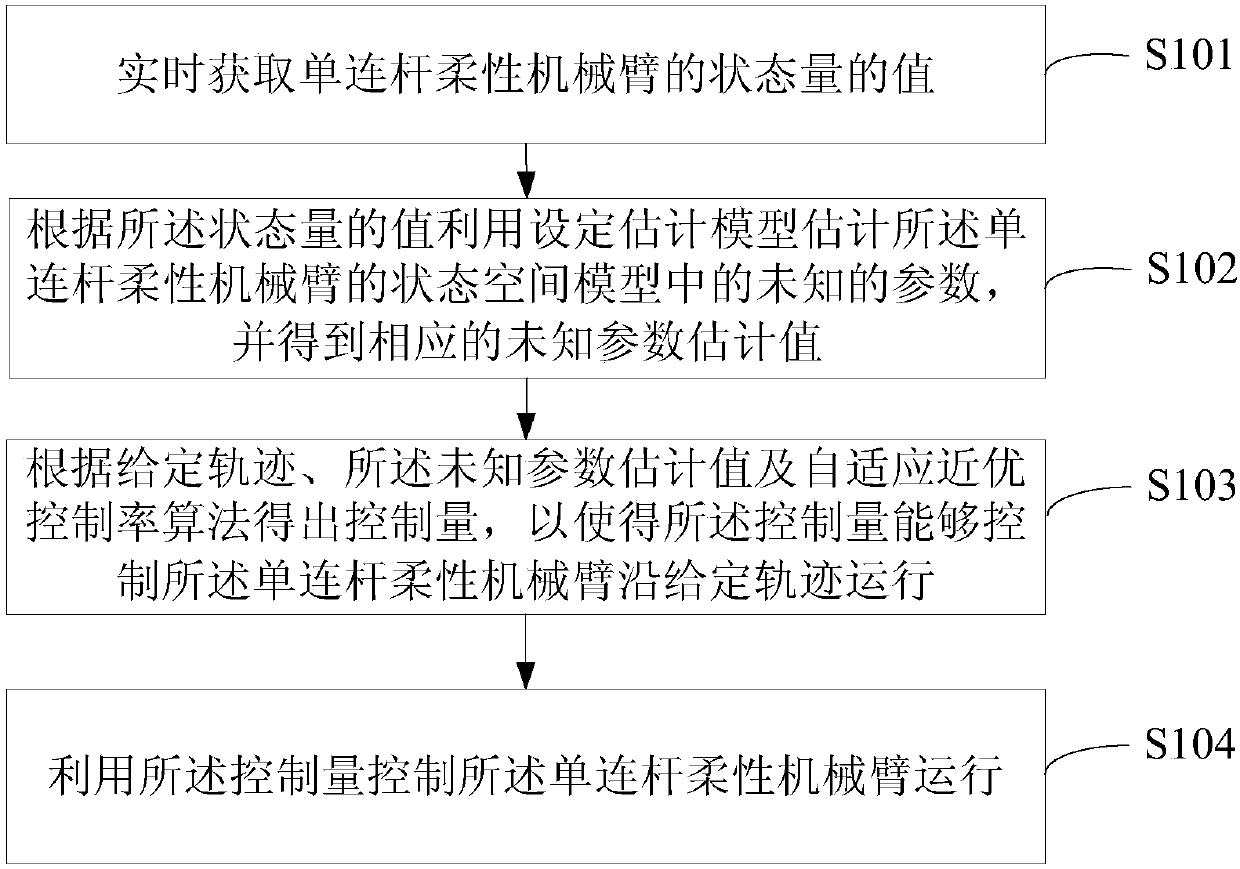
[0050] Such as figure 1 As shown, the first embodiment provides a single-link flexible manipulator control method for controlling the operation of the single-link flexible manipulator. Wherein, the single-link flexible manipulator includes a single-link manipulator and a motor, the motor is installed on the base of the single-link manipulator, and the single-link manipulator is provided with a flexible joint. In this embodiment, the single-link flexible manipulator control method can be executed by a controller such as a PLC (programmable logic controller), and includes the following contents.
[0051] Step S101, acquiring the value of the state quantity of the single-link flexible manipulator in real time.
[0052] In this embodiment, the real-time acquisition means that each time the single-link flexible manipulator control method is repeatedly executed, the latest value of the state quantity needs to be acquired. The state quantity refers to the physical quantity describi...
Embodiment 2
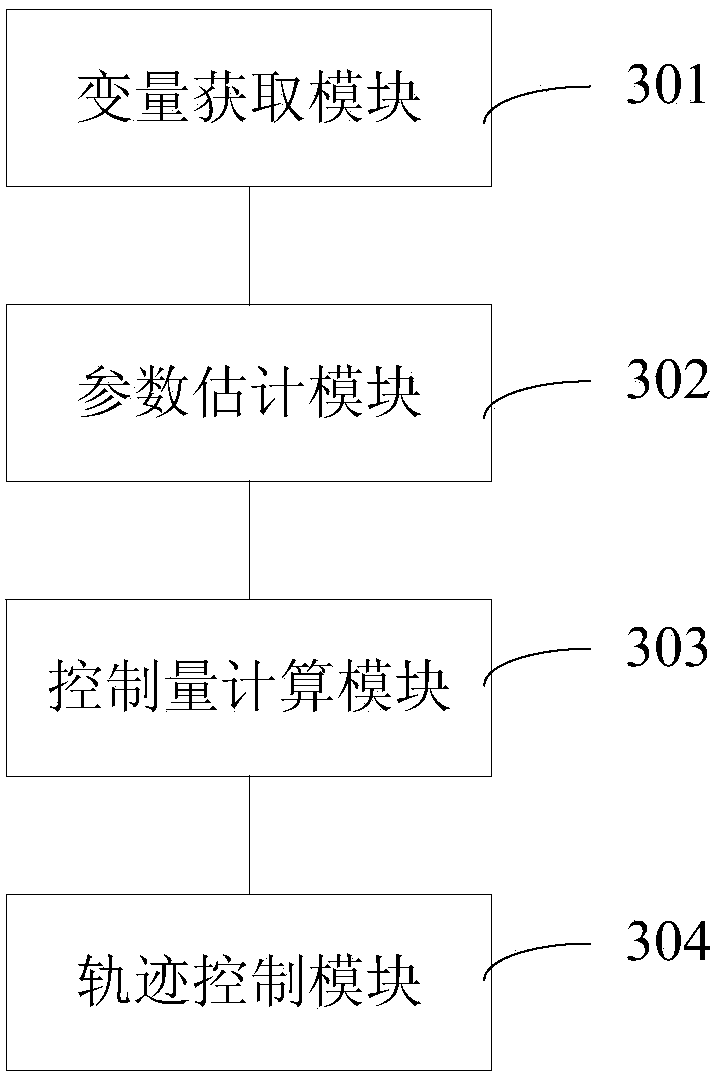
[0095] The second embodiment provides a single-link flexible manipulator control system, including the following content, please refer to image 3 .
[0096] The variable acquisition module 301 is used to acquire the value of the state quantity of the single-link flexible manipulator in real time.
[0097] The parameter estimation module 302 is used for estimating unknown parameters in the state space model of the single-link flexible manipulator by using a set estimation model according to the value of the state quantity, and obtaining corresponding estimated values of the unknown parameters.
[0098] The control quantity calculation module 303 is used to obtain the control quantity according to the given trajectory, the estimated value of the unknown parameter and the adaptive near-optimal control rate formula, so that the control quantity can control the single-link flexible manipulator along the run on the given trajectory.
[0099] The trajectory control module 304 is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com