Virtual reality based remote diagnosis and treatment robot force tactile representation method
A remote diagnosis and treatment and tactile reproduction technology, applied in the field of medical robots, can solve the problems of complex construction and implementation of the tactile presence system, difficulty for doctors to fully understand patients with tactile information, and unsatisfactory real-time and interactivity, so as to improve palpation effect, improve authenticity and real-time performance, and reduce the effect of doctor's misoperation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
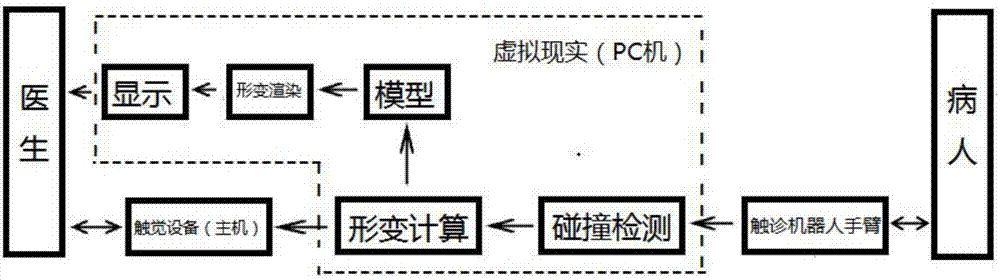
[0044] figure 1 It is a block diagram of the haptic system of the remote diagnosis and treatment robot based on virtual reality in the present invention.
[0045] In this example, if figure 1 As shown, the haptic system of remote diagnosis and treatment robot based on virtual reality mainly includes: PC, haptic interaction equipment, and palpation robot.
[0046] The PC includes hard disk, graphics card, driver and other necessary software and hardware conditions to realize the virtual reality part, and the virtual reality part includes the human tissue model, and the collision detection module that detects whether the virtual agent of the force-tactile interaction device collides with the human tissue model. Deformation calculation module after collision, etc.
[0047] The PC and the force-tactile interaction device are connected by cables as the host operating terminal for doctor operation and control, and the diagnosis and treatment robot as the slave operating terminal f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com