Return flight control system for unmanned plane cluster
A control system and unmanned aerial vehicle technology, applied in the direction of control/regulation system, three-dimensional position/channel control, non-electric variable control, etc., can solve the problems of high cost, manpower consumption, preparation time, large occupied area, etc., and achieve reduction The effect of restriction, cost reduction and labor cost saving
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
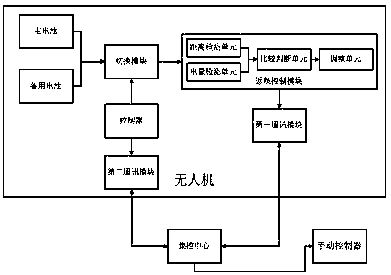
[0020] Such as figure 1 As shown, this application proposes a drone cluster return control system, the drone cluster includes N drones, and the N drones are in the hovering flight space; including a centralized control center , the N drones all include: a return control module, a first communication module, a second communication module, a controller, a switching module, a main battery, a backup battery, and the controller is connected to the second communication module and the return control module, the return control module is connected to the first communication module; the return control module receives the return command sent by the centralized control center through the first communication module; the return control module includes a distance detection unit, a power detection unit, a comparison Judgment unit, adjustment unit; the distance detection unit is used to detect the linear distance from the hovering position to the return destination, the power detection unit is...
Embodiment 2
[0027] Such as figure 1 As shown, this application proposes a drone cluster return control system, the drone cluster includes N drones, and the N drones are in the hovering flight space; including a centralized control center , the N drones all include: a return control module, a first communication module, a second communication module, a controller, a switching module, a main battery, a backup battery, and the controller is connected to the second communication module and the return control module, the return control module is connected to the first communication module; the return control module receives the return command sent by the centralized control center through the first communication module; the return control module includes a distance detection unit, a power detection unit, a comparison Judgment unit, adjustment unit; the distance detection unit is used to detect the linear distance from the hovering position to the return destination, the power detection unit is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com