NAO robot system based on action collection
A robot system and motion acquisition technology, applied in the field of robot systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
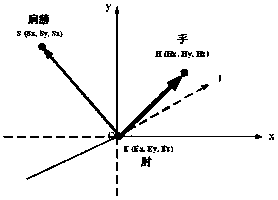
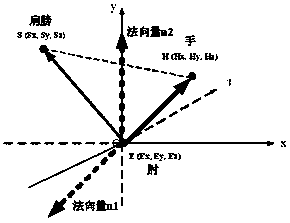
[0027] Such as figure 2 As shown, the NAO robot system based on motion acquisition includes such as figure 1 The NAO robot, motion picker and converter shown.
[0028] Among them, the NAO robot is used to simulate the movement of the human body. For example, imitating human dance movements or labor movements.
[0029] The motion collector is used to collect images related to the human body, such as visible light images or infrared images. As an optional solution, the motion collector can adopt the Kinect somatosensory sensor.
[0030] Specifically, the Kinect sensor is a type of 3D camera.
[0031] The hardware components of the Kinect sensor are:
[0032] 1) Microphone array: the sound is collected from 4 microphones, and the background noise is filtered at the same time to locate the sound source.
[0033] 2) Infrared projector: Actively project the near-infrared spectrum. When it irradiates rough objects or penetrates frosted glass, the spectrum will be distorted and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com