Bionic ant robot
A robot and bionic technology, applied in the direction of manipulators, motor vehicles, program-controlled manipulators, etc., can solve the problems of large robots, inability to enter narrow environments, and difficult places with steep natural environments, so as to facilitate geological exploration and natural investigation, The effect of improving turning coordination and ensuring continuity of walking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
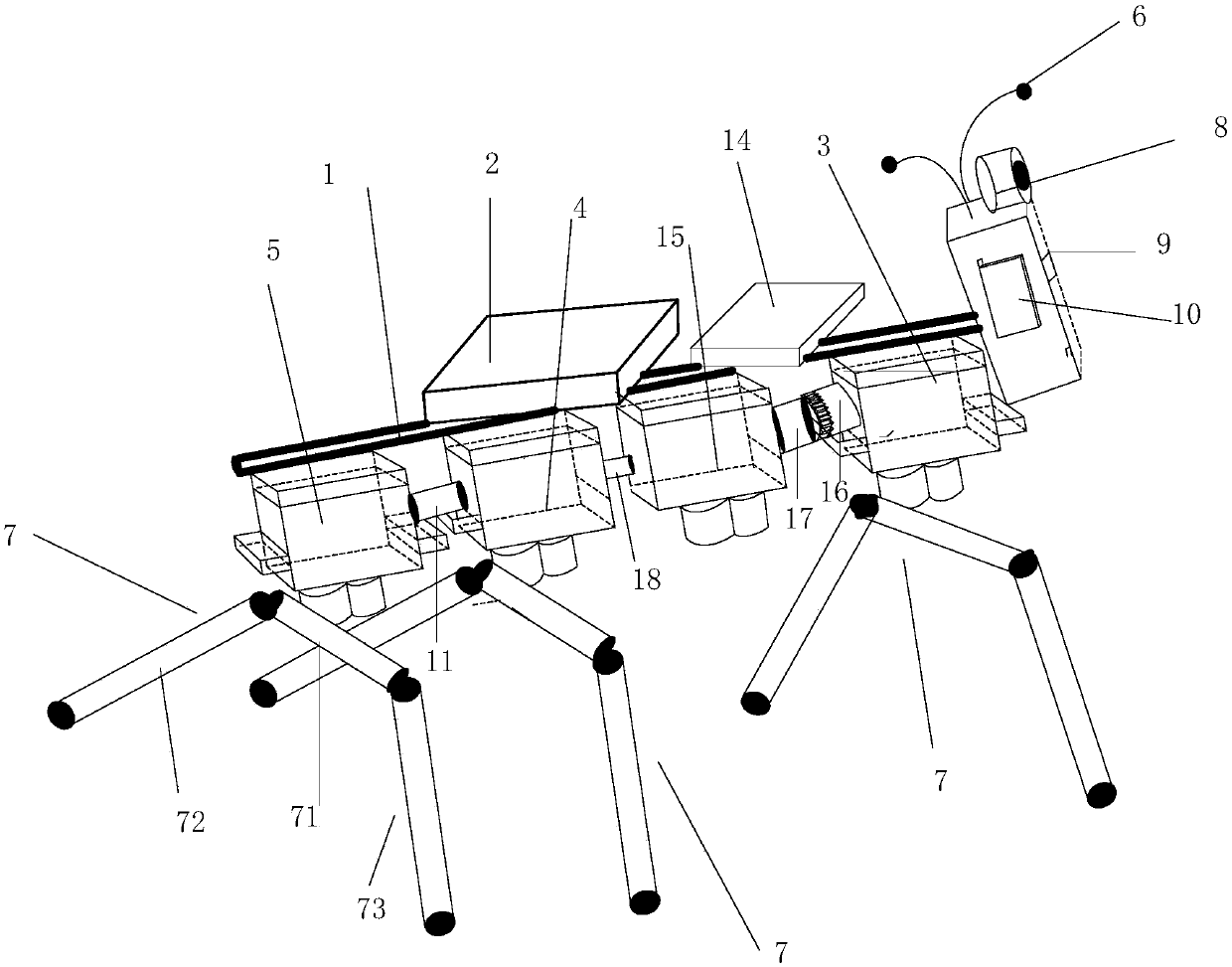
[0032] Such as figure 1 and image 3 As shown, a kind of bionic ant robot of the present embodiment comprises a trunk frame 1, a power supply module 2 is arranged above the trunk frame 1, a walking mechanism is provided below, a detection mechanism and a control mechanism for controlling the walking mechanism are arranged at the front end; The mechanism includes a steering steering gear 33, a first following steering gear 4 and a second following steering gear 5, and the output shafts of the steering steering gear 3, the first following steering gear 4 and the second following steering gear 5 are connected with a mechanical leg 7; Steering gear 3 is located at the front end below trunk frame 1, and steering steering gear 3 drives the first following steering gear 4 to turn and walk through a gear transmission mechanism. At the rear end of machine 3, one end of power transmission shaft 13 is connected to steering gear 3, and the other end is circumferentially fixed transmissio...
Embodiment 2
[0042] Such as figure 2 and Figure 4 As shown, a kind of bionic ant robot of the present embodiment comprises trunk frame 1, and the top of trunk frame 1 is provided with power supply module 2, and the bottom is provided with walking mechanism, and the front end is provided with detection mechanism and the control mechanism of control walking mechanism; Including steering steering gear 3, connecting steering gear 15, first following steering gear 4 and second following steering gear 5, the output shafts of steering steering gear 3, first following steering gear 4 and second following steering gear 5 are connected with mechanical Leg 7; Steering steering gear 3 is located at the front end below the trunk frame 1, the front end connecting steering gear 15 is provided with a gear 16, and the rear end is provided with a second connector 18, and the gear 16 is circumferentially fixed on a connecting shaft 17, The other end of the connecting shaft 17 is connected to the steering ...
Embodiment 3
[0052] The present embodiment provides a walking control method utilizing the bionic ant robot described in Embodiment 1 and Embodiment 2, wherein the main control MCU adopts a STEM32 processor, and the method mainly includes the following steps:
[0053] S1. Set the walking start time of the steering steering gear, the first following steering gear and the second following steering gear respectively in the main control MCU, that is, set the timing times of the first timer, the second timer, and the third timer respectively. In this way, the walking start time of the steering steering gear is the initial time T0, the walking start time of the first following steering gear is T1, and the walking starting time of the second following steering gear is T2, wherein T0<T1<T2.
[0054] S2. Set the walking parameters of the steering steering gear, the first following steering gear, and the second following steering gear according to the running start time. The running parameters includ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com