A design method of mobile robot docking berth
A technology of mobile robot and design method, applied in instruments, motor vehicles, non-electric variable control, etc., to achieve the effect of reducing equipment complexity, improving automation level, and facilitating high-precision positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0030] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
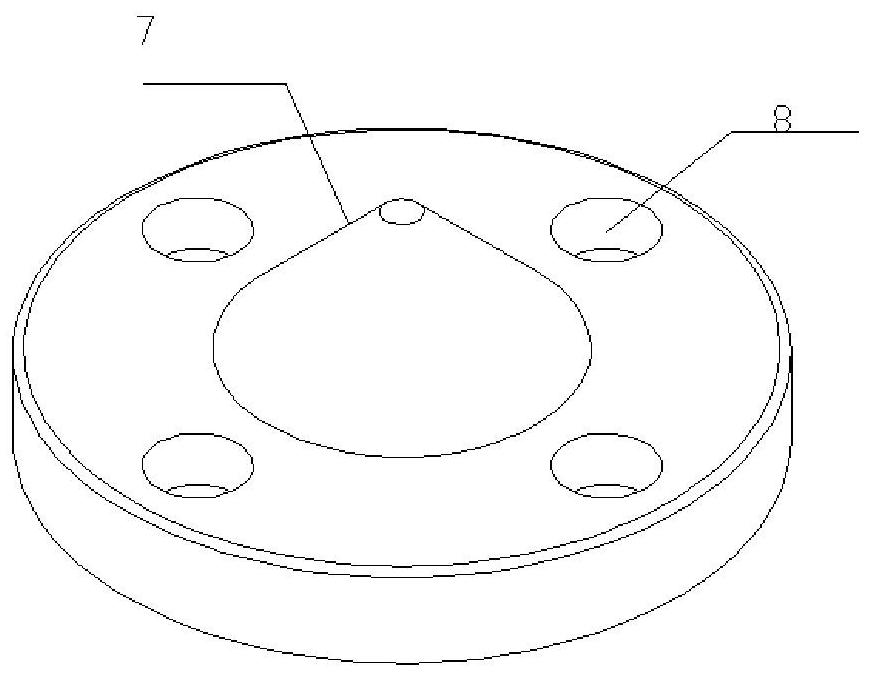
[0031] figure 1 It is a schematic diagram of the connecting berth structure, figure 2 It is a schematic diagram of the structure of the coupling positioning pin for the docking berth, image 3 It is a schematic diagram of the structure of the coupling positioning groove of the carrier; the connecting berth mainly includes the skeleton 4, the coupling positioning pin 1, the jacking mechanism 2, the proximity switch 3, the cylinder 5, and the solenoid valve 6; the coupling positioning pin 1 includes the protruding cone 7 , threaded sinking groove 8, wherein the threaded sinking groove 8 is used for coupling the connection between the positioning pin 1 and the skeleton 4; Figure 4 and Figure 5 The flow charts of AGV entering the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com