Real-time tracking and precise estimation method of GNSS phase system deviation based on particle filter
A particle filtering and real-time tracking technology, applied in the field of satellite positioning system and positioning measurement, which can solve problems such as failure, need to be accurately estimated or corrected, and cannot be successfully fixed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0096] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
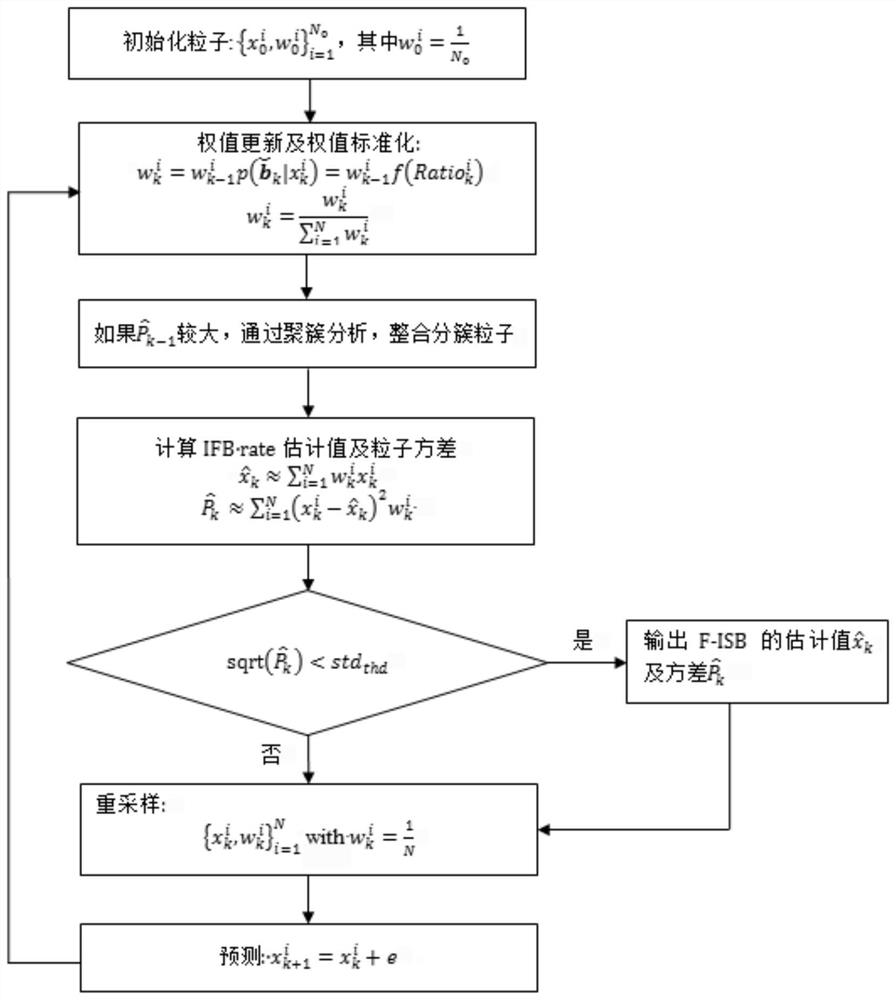
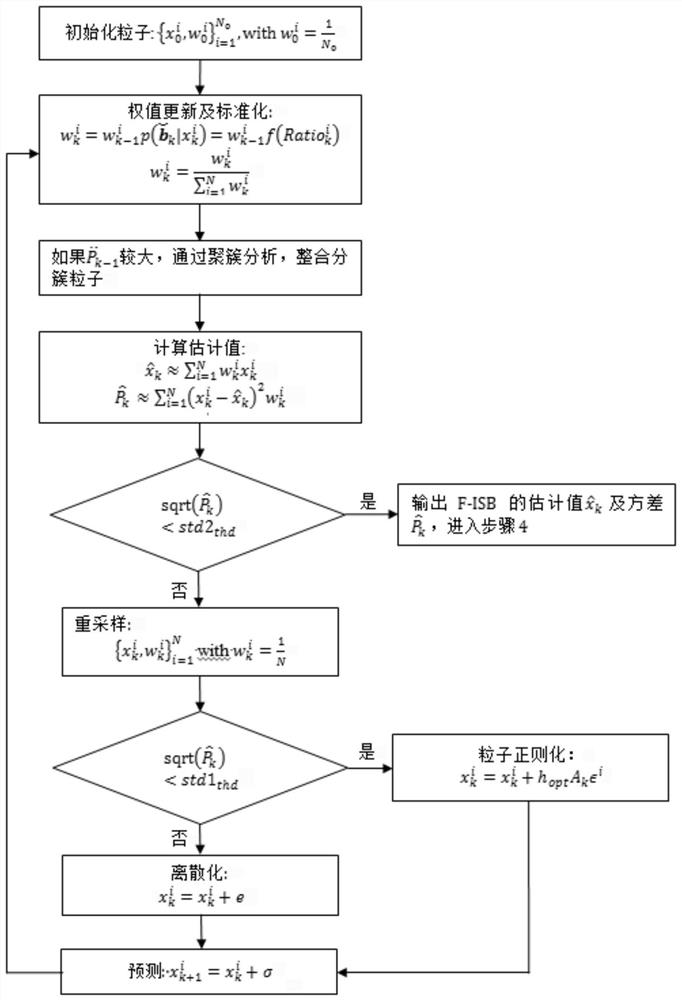
[0097] Such as Figure 1-2 As shown, a method for real-time tracking and precise estimation of the deviation between GNSS phase systems based on particle filtering includes the following steps:
[0098] Step 1: Preprocess the satellite navigation data, import satellite ephemeris, current epoch pseudorange observation value and current epoch phase observation value; preprocessing includes data format conversion, gross error detection and elimination, cycle slip detection and repair, etc. deal with;
[0099] The pseudo-range non-difference observation equation of GNSS is expressed as:
[0100]
[0101] The phase non-difference observation equation of GNSS system is:
[0102]
[0103] In the formula: i is the serial number of the satellite, a is the serial number of the observation station, P is the undifferenced pseudo-range observation ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com