Method used for determining all singular configurations of 9-freedom-degree mechanical arm
A technology of manipulators and degrees of freedom, applied in the field of manipulators, can solve problems such as the inability to determine the singular configuration of redundant manipulators, and achieve the effects of high reliability and convenient analysis and calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0010] The present invention will be further described below in conjunction with the accompanying drawings. It should be pointed out that these illustrations are only exemplary and do not limit the present invention.
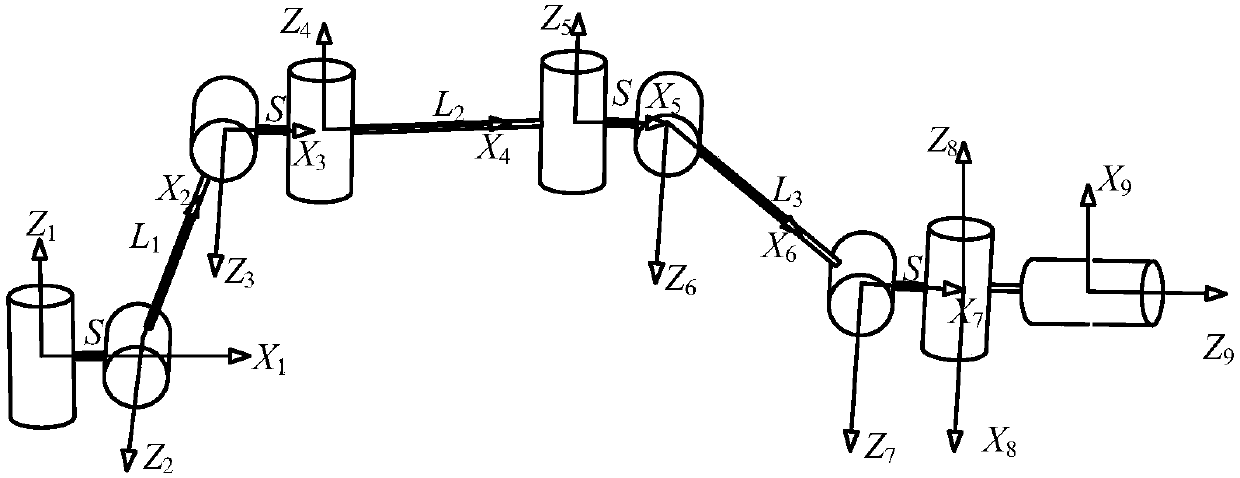
[0011] This disclosure will detail a method for determining all singular configurations of a 9-DOF robotic arm. Such as figure 1 As shown, the 9-DOF manipulator is composed of 4 eccentric joints. In order to increase the flexibility of the manipulator, a rotating shaft is added at the end of the manipulator, which makes the 9-DOF manipulator have a certain weight. structure function. In addition, specifically, each eccentric joint has two degrees of freedom perpendicular to each other, so that the 9-DOF manipulator has a higher degree of flexibility.
[0012] This disclosure will employ a screw-based approach to singularity analysis of a robotic arm. The screw can be expressed as the following form
[0013]
[0014] where s and s 0 is the unit helix and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com