A wearable flexible transmission exoskeleton for wrist rehabilitation training
A rehabilitation training and flexible transmission technology, applied in passive exercise equipment, physical therapy, etc., can solve the problems of low compatibility between exoskeleton joints and human joints, reducing the range of joint motion, compensation for exoskeleton joint dislocation, etc. To achieve the effect of ensuring the range of activities, easy to wear, and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
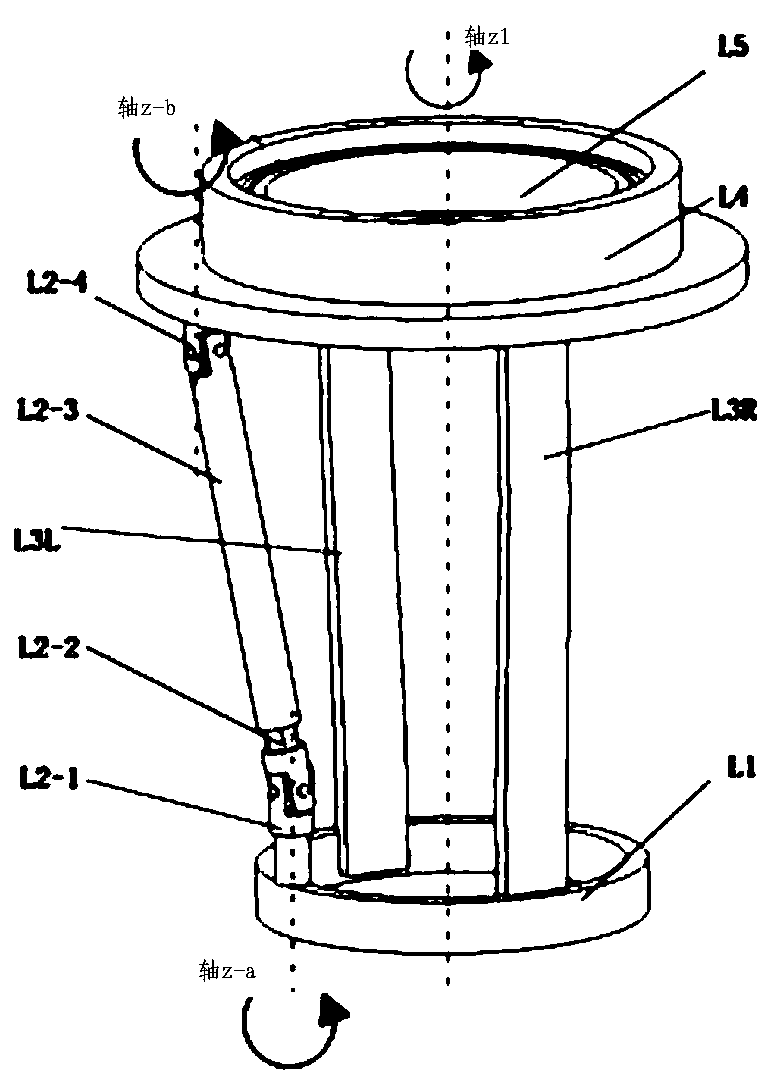
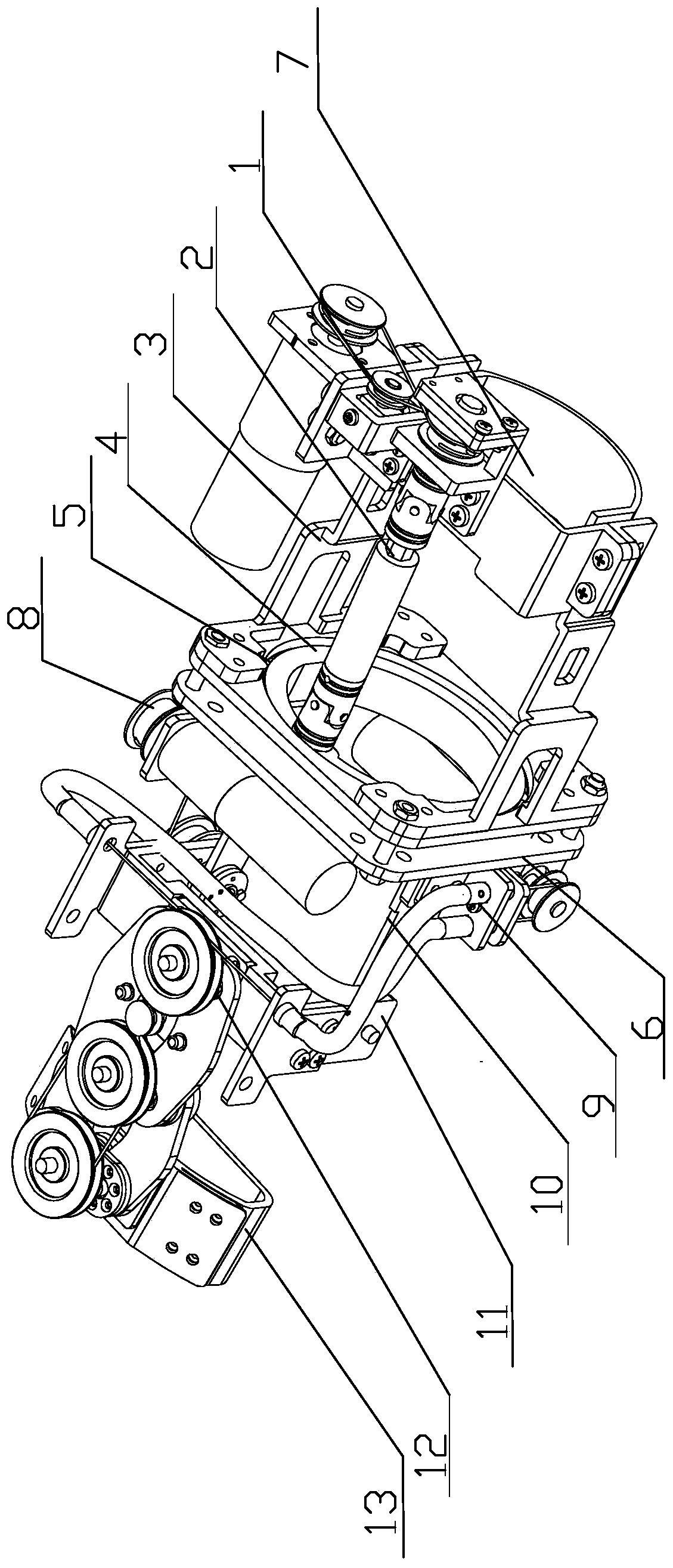
[0014] Specific implementation mode one: combine Figure 1-Figure 9 Describe this embodiment, a wearable wrist rehabilitation training flexible transmission exoskeleton described in this embodiment, which includes a spinning wire rope transmission assembly 1, a telescopic cross universal coupling transmission assembly 2, a forearm spinning ring 4, a thin Wall bearing 5, bearing sleeve assembly 6, forearm binding part 7, flexion and extension steel wire rope transmission assembly 8, ulnar radial deviation lasso transmission assembly 9, coordinated movement mechanism bracket 11, coordinated movement mechanism assembly 12, human hand fixing assembly 13, two A first forearm support frame 3 and two forearm second supports 10; the spin wire rope transmission assembly 1 is installed on the forearm binding member 7, the forearm spin ring 4 is arranged in the bearing sleeve assembly 6, and the forearm spin ring 4 A thin-walled bearing 5 is installed between the bearing sleeve assembly ...
specific Embodiment approach 2
[0015] Specific implementation mode two: combination Figure 1-Figure 3 Describe this embodiment, a wearable flexible transmission exoskeleton for wrist rehabilitation training described in this embodiment, the forearm binding member 7 includes an upper frame body and a lower arc-shaped plate, and the upper frame body and the lower arc-shaped plate pass through a plurality of bolts The threaded connection is fastened on the forearm of recovery activity through the forearm binding member 7, and the others are the same as the specific embodiment one.
specific Embodiment approach 3
[0016] Specific implementation mode three: combination figure 1 , figure 2 , Figure 8 and Figure 9 Describe this embodiment, a wearable wrist rehabilitation training flexible transmission exoskeleton described in this embodiment, the spin wire rope transmission assembly 1 includes a spin wire rope transmission motor, an automatic wire rope driven wheel bracket, an automatic wire rope driving wheel 101, an automatic wire rope Driven pulley 102, automatic wire rope pretension wheel 103, automatic wire rope pretension wheel preload screw 104, automatic wire rope pretension wheel guide plate 105, automatic wire rope pretension wheel pretension wheel slide table 106 and automatic wire rope pretension wheel wire rope 107; The wire rope driving wheel 101 is set on the output shaft of the spinning wire rope transmission motor, the automatic wire rope pretension wheel pretension wheel slide table 106 is slidably arranged on the automatic wire rope pretension wheel guide plate 105,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com