Pneumatic-muscle-based multi-degree-of-freedom humanoid pole-climbing robot and control system thereof
A pneumatic muscle and control system technology, applied in the field of bionic robots, can solve the problems of easy burning, high rigidity and unsuitable use of the motor, and achieve the effect of high power/mass ratio, light weight and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
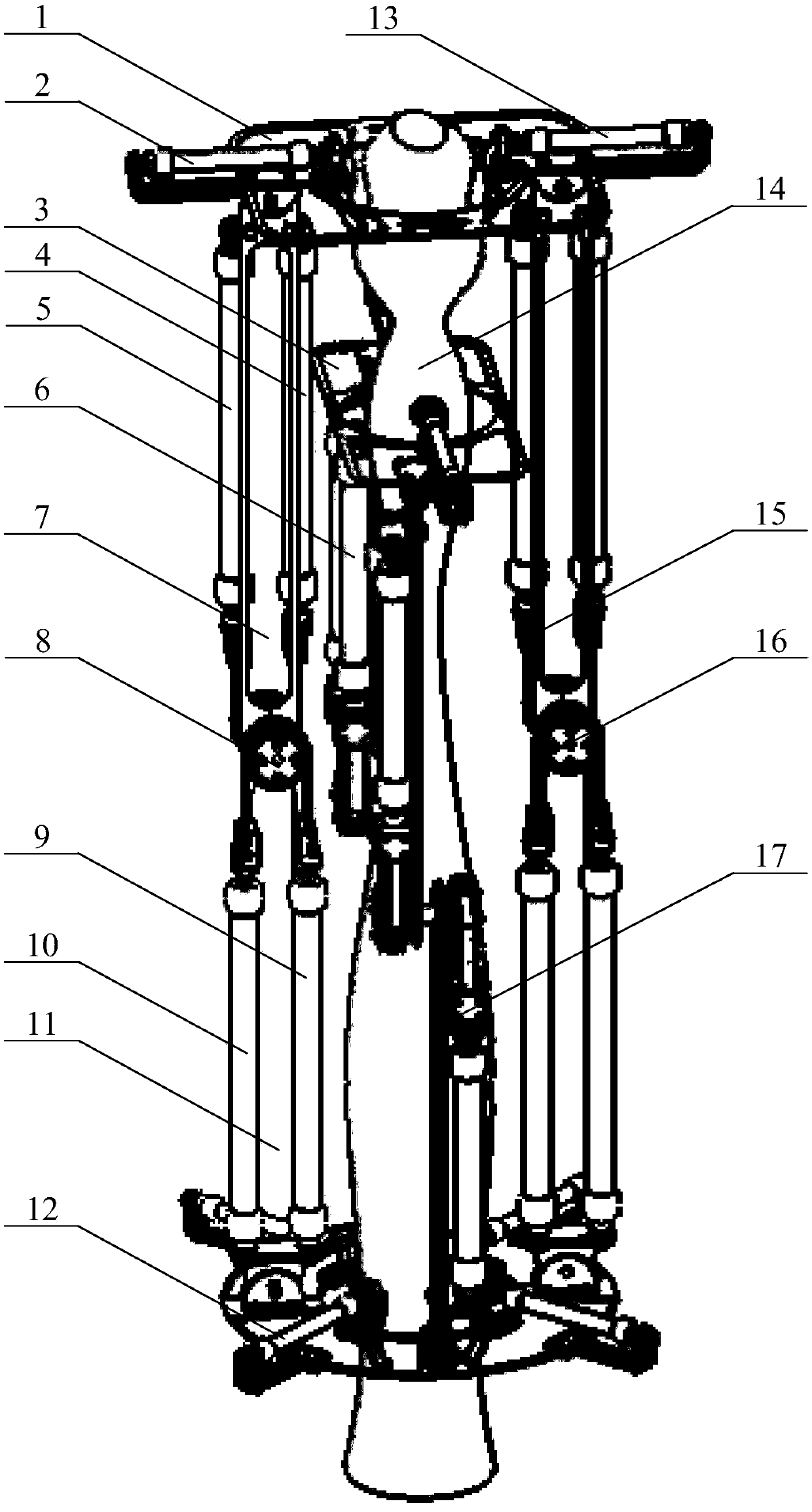
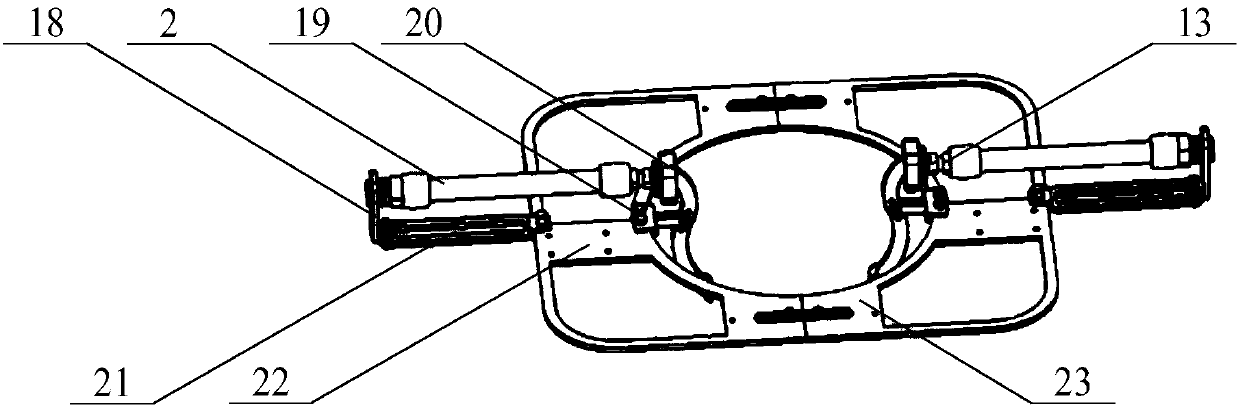
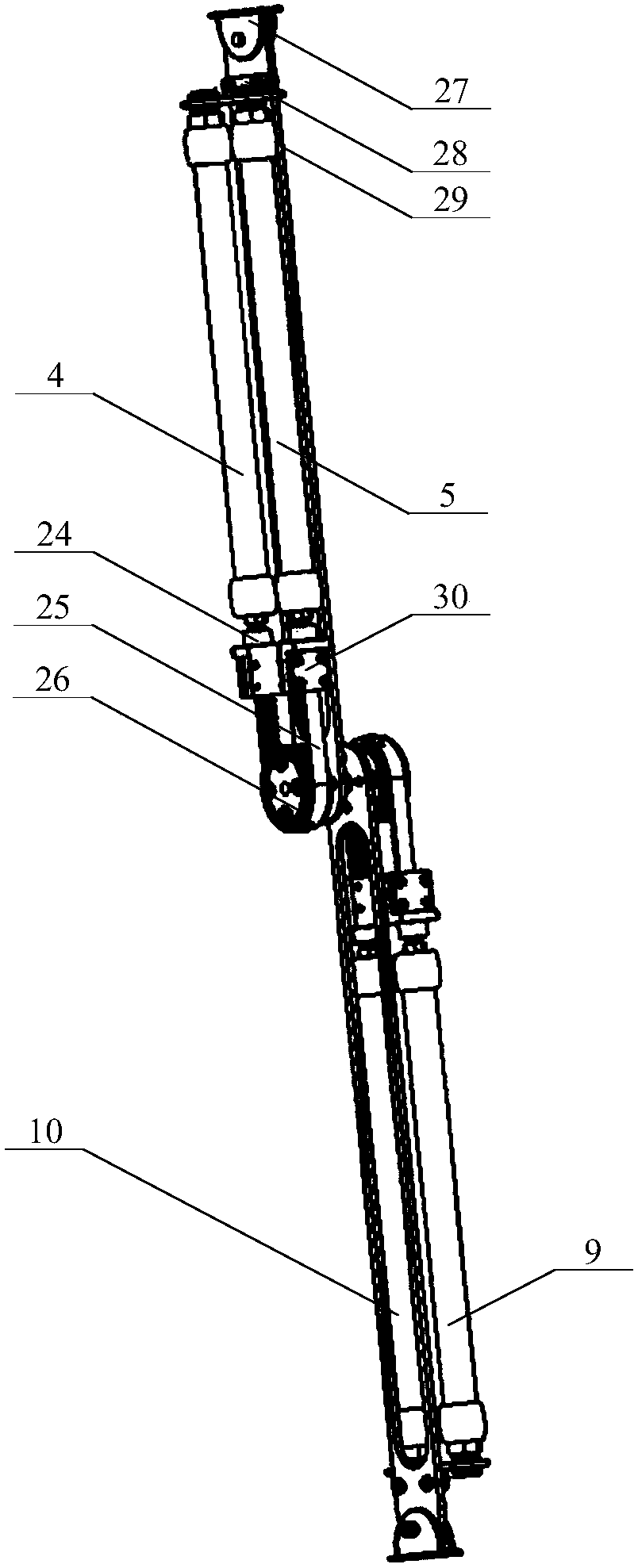
[0035] like Figure 1-5 As shown, the present invention is based on the pneumatic muscle multi-degree-of-freedom humanoid pole climbing robot system comprising: upper end Y direction clamping system 1, clamping pneumatic muscle one 2, upper end X direction clamping system 3, peristaltic pneumatic muscle one 4, peristaltic pneumatic muscle Muscle 2 5, outrigger 4 6, outrigger 1 upper half 7, outrigger 1 8, peristaltic pneumatic muscle 3 9, peristaltic pneumatic muscle 4 10, lower half of outrigger 11, lower end clamping system 12, clamping pneumatic Muscle two 13, climbing pole 14, climbing system 15, outrigger three 16, outrigger two 17, pneumatic muscle support plate one 18, clamping joint two 19, clamping plate one 20, clamping joint one 21, Clamping mounting plate 1 22, clamping mounting plate 2 23, belt connector 1 24, belt 25, pulley 26, leg fixing plate 27, pneumatic muscle mounting plate 28, leg support plate 29, belt connector 2 30, Pneumatic muscle support plate 2 31...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com