Intelligent anti-swinging crane control system and method based on fuzzy PID control
A control system and crane technology, applied in general control systems, control/regulation systems, adaptive control, etc., can solve problems such as less engineering applications, increase adaptability and robustness, and improve the ability to resist external interference. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
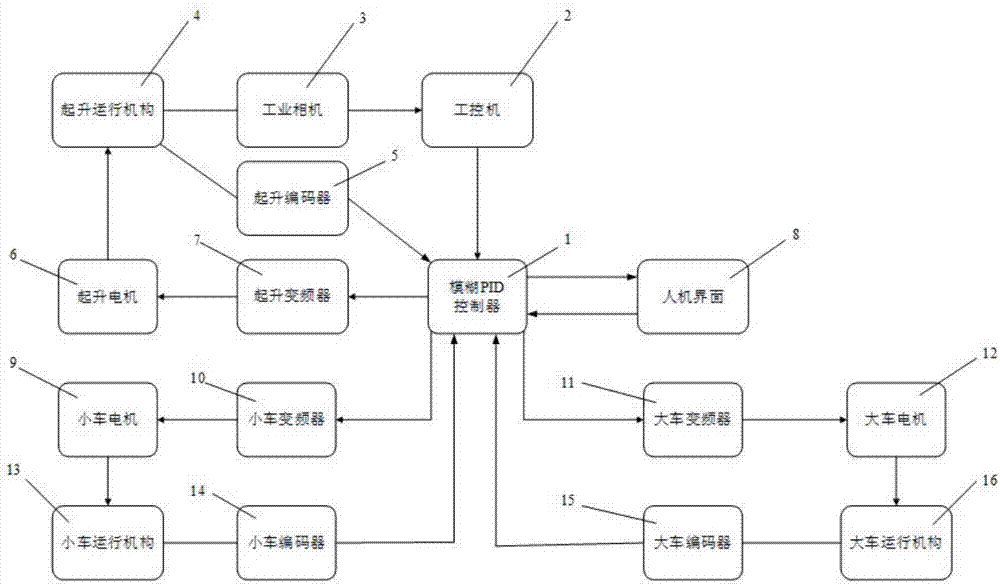
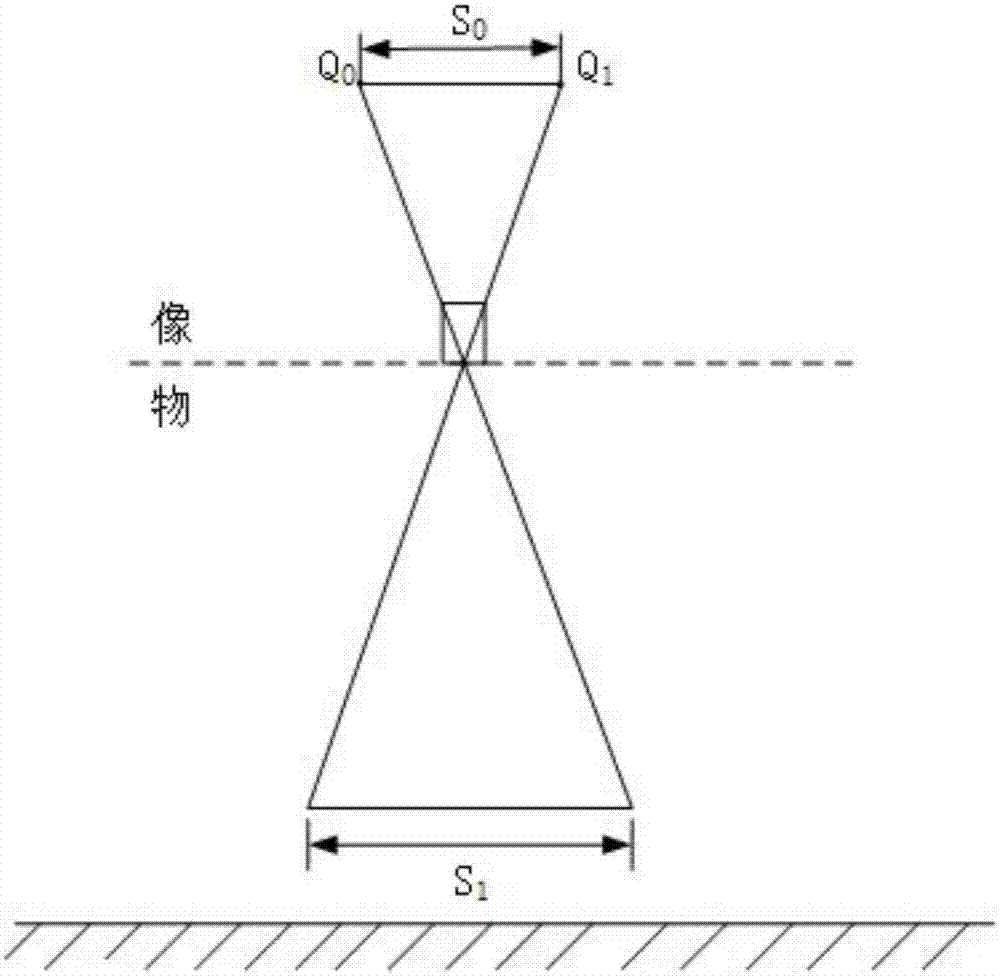
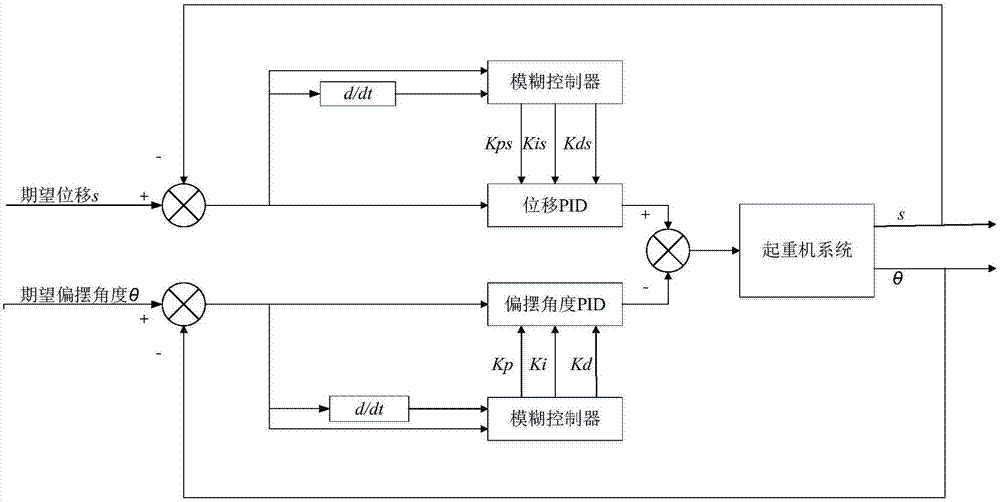
[0025] Such as Figure 1 to Figure 5 As shown, the crane intelligent anti-sway control method based on fuzzy PID control in the present invention mainly includes a fuzzy PID controller 1, an industrial computer 2, an industrial camera 3, a lifting encoder 5, a man-machine interface 8, a trolley encoder 14 and a cart Encoder 15, wherein the industrial camera 3 is installed below the lifting mechanism, the lifting encoder 5 is installed at one end of the lifting reel, and the trolley encoder 14 and the cart encoder 15 are respectively installed on the trolley and the cart. The crane includes a lifting operating mechanism 4, a trolley operating mechanism 13, and a trolley operating mechanism 16, wherein the hoisting operat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com