Virtual reality based annular RGV semi-physical simulation system and non-empty running scheduling algorithm
A kind of hardware-in-the-loop simulation and virtual reality technology, which is applied in the ring RGV hardware-in-the-loop simulation system and the field of no-running scheduling algorithm, can solve problems such as algorithm debugging complexity, scheduling rule complexity, accident occurrence, etc., and achieve a universal effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be described in further detail below through specific embodiments and in conjunction with the accompanying drawings.
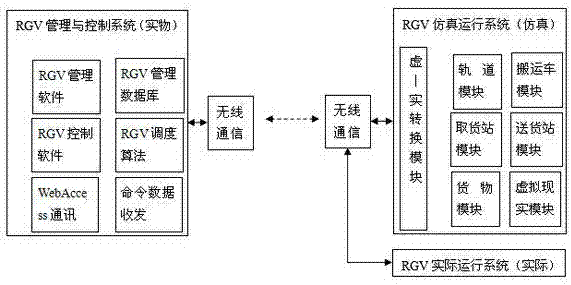
[0060] The invention adopts virtual reality technology, designs RGV three-dimensional dynamic simulation system (virtual part), RGV management control system and scheduling algorithm (real part), and realizes half-physical simulation operation of RGV system. When the simulation is running, the RGV management control system is the actual control system, and the RGV three-dimensional dynamic simulation system is the virtual controlled object. In actual operation, the control (feedback) signal of the RGV management control system is switched to the real RGV operation system. At this time, the RGV management control system and the RGV operation system are both real systems, performing the cargo handling tasks in production.
[0061] Such as Figure 4 As shown, a ring RGV hardware-in-the-loop simulation system based on virtual rea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com