A quadruped robot capable of attitude adjustment in the air
A technology of quadruped robots and space robots, which is applied in the direction of aerospace vehicles, motor vehicles, aircraft, etc., can solve the problems of insufficient speed of attitude adjustment, large flywheel mass, and body interference, etc., and achieve flexible and changeable attitude adjustment. Reduce installation space and improve utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017]The invention will be further described in detail below with reference to the accompanying drawings and examples.
[0018]The present invention is a quadruple robot that enables aerial attitude adjustment, which will be described in detail with the structural map of the robot in the air different gesture transform method and the control method of the flywheel.
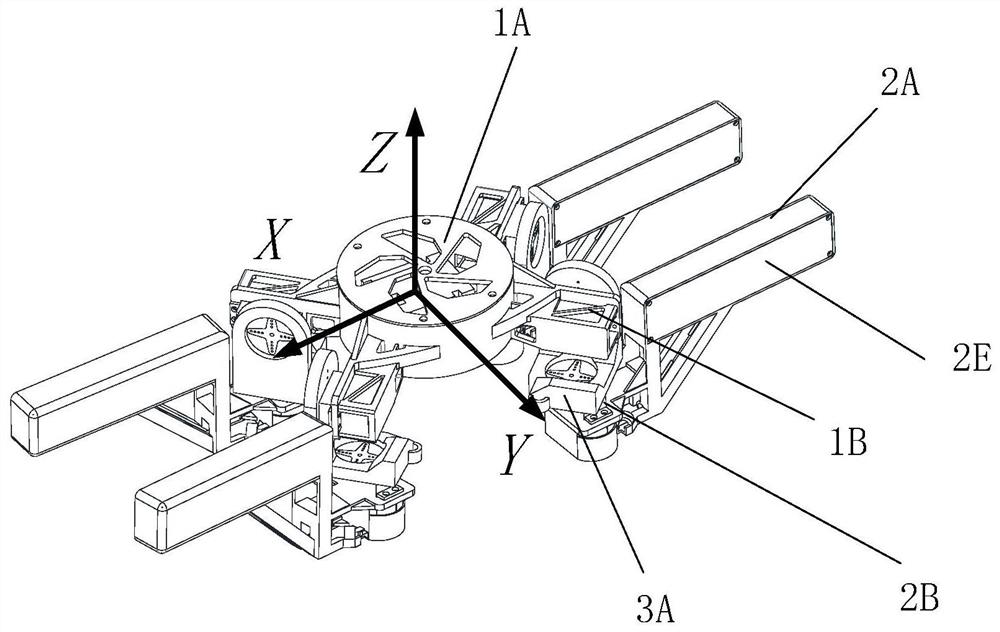
[0019]Such asfigure 1 As shown, the robot is composed of the torso portion 1, the limb portion 2, and the connecting portion 3. The limb portion 2 is connected to the torso portion 1 by the connecting portion 3, in particular to the trunk motor 1b, the limb motor 2b on the connecting member 3a, constitutes a two degree of freedom, and the torso motor 1b and the rotating shaft of the limb motor 1a are mutually Vertical and intersecting a point, this point is the actual rotation center of the hinge. Therefore, each limb can be rotated for 2 degrees of freedom. The mounting of the limbs is blocked by the body lid 2e, hidden ins...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com