A fully automated micro quadrotor autonomous landing and charging method and system
A four-rotor, micro-miniature technology, applied in the direction of electric vehicle charging technology, charging stations, control/regulation systems, etc., can solve problems such as high power consumption, restricted flight distance, and limited application fields, so as to avoid cost increases, Guaranteed autonomous landing and improved positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0053] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0054] The application principle of the present invention will be described in detail below in conjunction with the accompanying drawings.
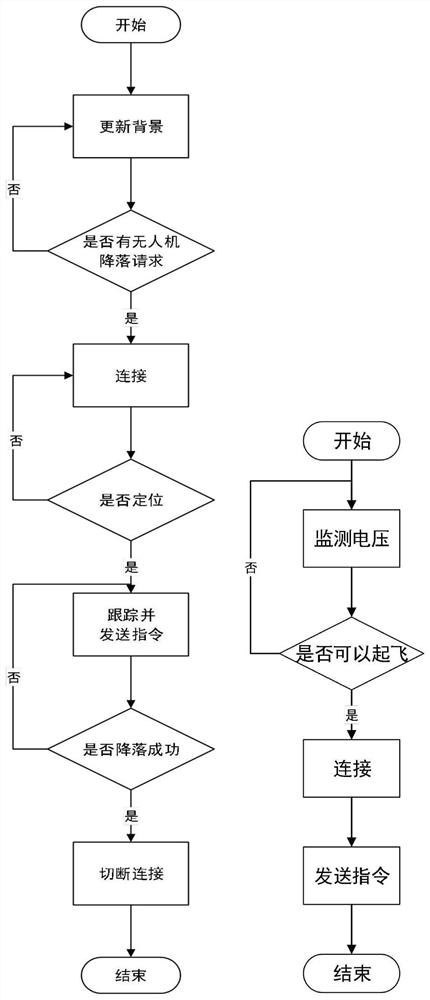
[0055] Such as figure 1 As shown, the method for autonomous landing and charging of the automated miniature quadrotor provided by the embodiment of the present invention includes the following steps:
[0056] S101: Using the positioning method of GPS positioning and monocular visual positioning fusion, the micro-quadrotor flies to the ground directly above the ground relay station through the onboard GPS positioning, and sets up a camera that shoots vertically to the sky to shoot the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com