Mobile robot real-time positioning method based on laser radar and map matching
A mobile robot and laser radar technology, applied in two-dimensional position/channel control, instruments, surveying and navigation, etc., can solve the problem that the robot cannot perceive the position, and achieve the effect of improving time and space efficiency and wide applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further described below in conjunction with specific examples.
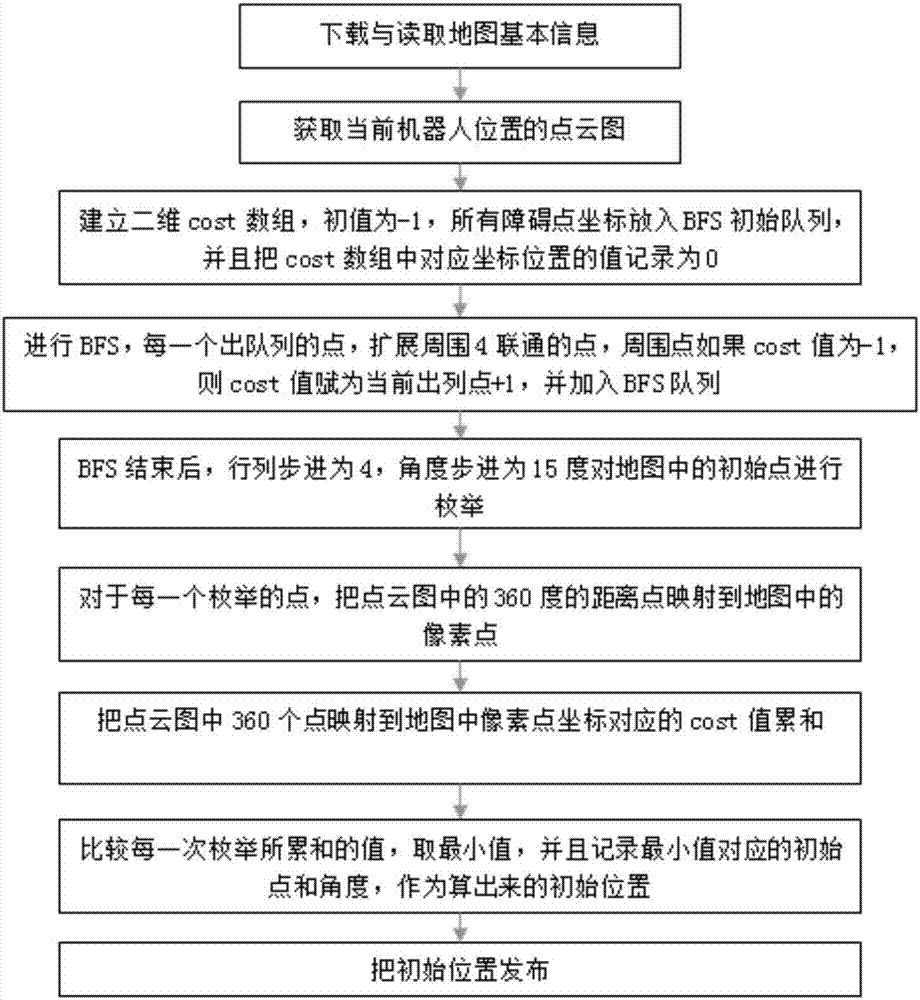
[0051] Such as figure 1 As shown, the real-time positioning method of a mobile robot based on lidar and map matching provided in this embodiment includes the following steps:
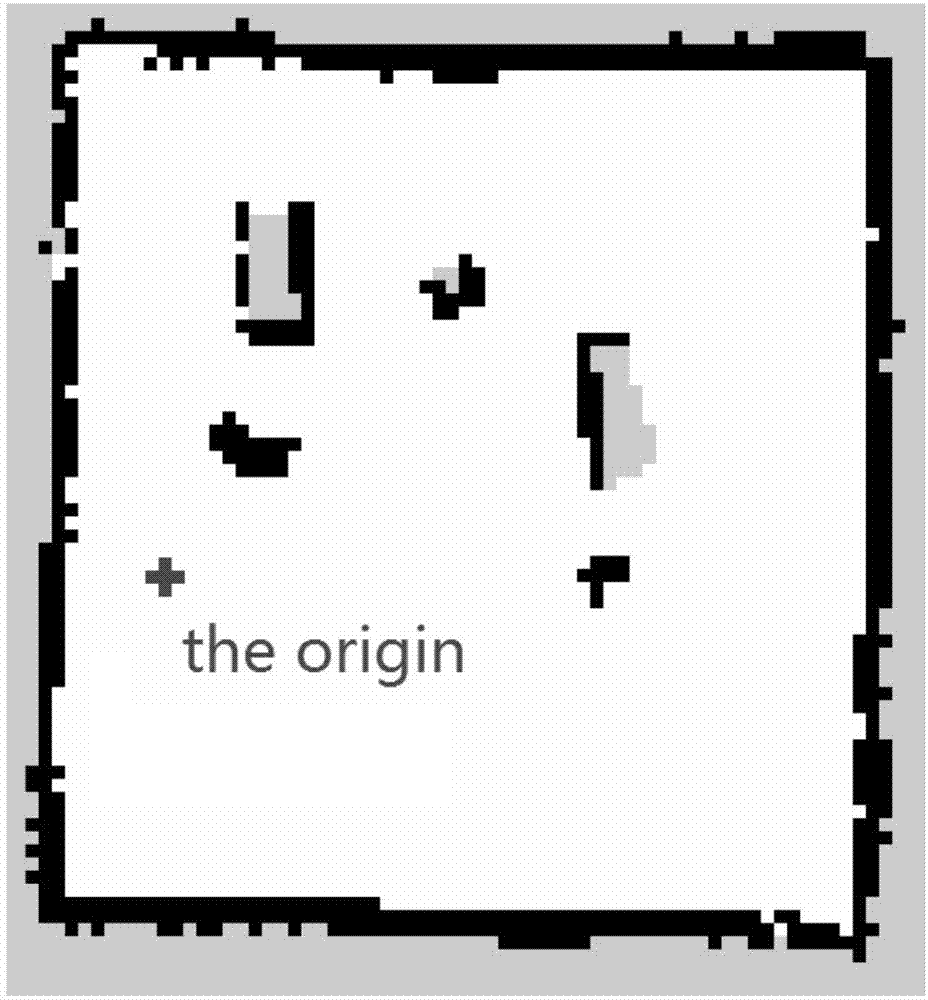
[0052] 1) Establish a 2D map: use the SLAM algorithm to establish a 2D obstacle map of the environment according to the principle of lidar ranging when the robot is moving in the environment. In the map, valid areas are divided into two categories, namely obstacle pixels and free pixels. Among them, the obstacle pixel indicates that there is an obstacle in the real space corresponding to this pixel, and the robot cannot reach or cross it, while the free pixel indicates that there is no obstacle in the space, and the robot can pass through.
[0053] 2) Divide the 2D map into blocks: Divide the map horizontally and vertically at equal distances, so that the map is divided into square blocks similar to a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com