Mechanical arm grabbing method based on cognitive maps
A cognitive map, robotic arm technology, applied in the direction of manipulator, 2D image generation, program control manipulator, etc., can solve the problems of failure, single grasping position, large amount of training data, etc., to achieve rapid detection and strong practicability , the effect of good environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
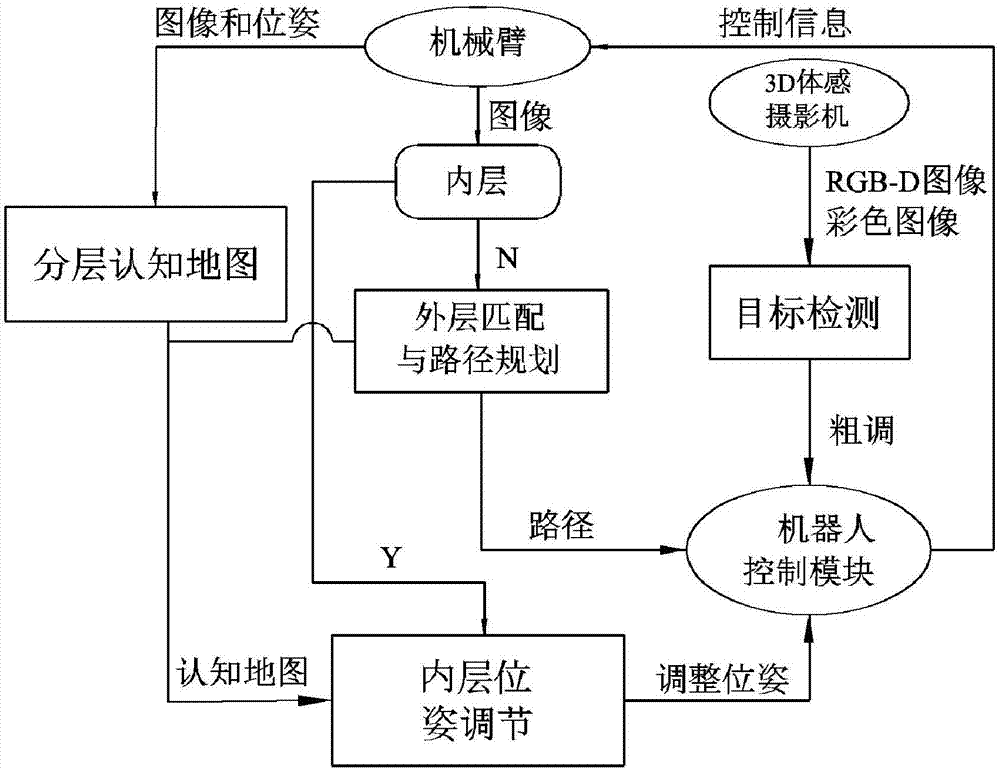
[0033] like figure 1 As shown, a cognitive map-based robotic arm grasping method includes the following steps:
[0034] Establish an outer cognitive map and an inner cognitive map;
[0035] According to the collected image information of the target object, the distance between the current robotic arm and the object is obtained, and the movement is made to the position of the outer cognitive map;
[0036] According to the image information of the current location and the closest point in the outer cognitive map, the outer layer is matched;
[0037] According to the matching results of the outer layer, plan a trajectory in the outer map that can move to the inner cognitive map;
[0038] Move to the area established by the inner cognitive map according to the above trajectory;
[0039] In the inner cognitive map, path planning is carried out a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com