Lane changing trajectory planning method for unmanned vehicle based on vehicle-to-vehicle cooperation
A technology for unmanned vehicles and trajectory planning, applied in two-dimensional position/channel control, vehicle position/route/height control, motor vehicles, etc., can solve the problem of real-time control and real-time collision avoidance when it is difficult to change lanes And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
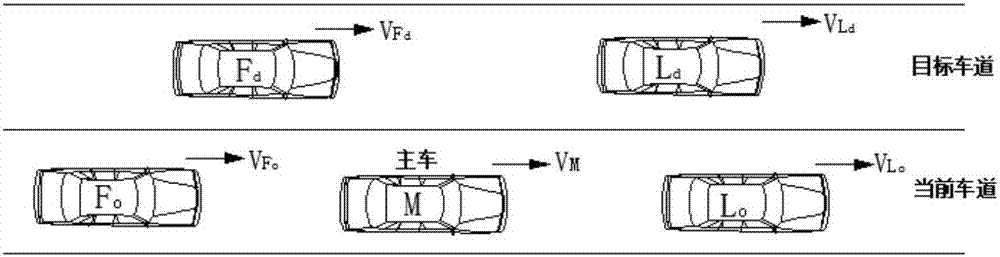
[0053] like figure 1 As shown, when the main vehicle M is changing lanes, the surrounding vehicles mainly include the front vehicle L in the current lane o , the vehicle behind the current lane F o , the vehicle in front of the target lane L d and the vehicle behind the target lane L o . A lane-changing trajectory planning method for unmanned vehicles based on vehicle-vehicle coordination includes the following steps:
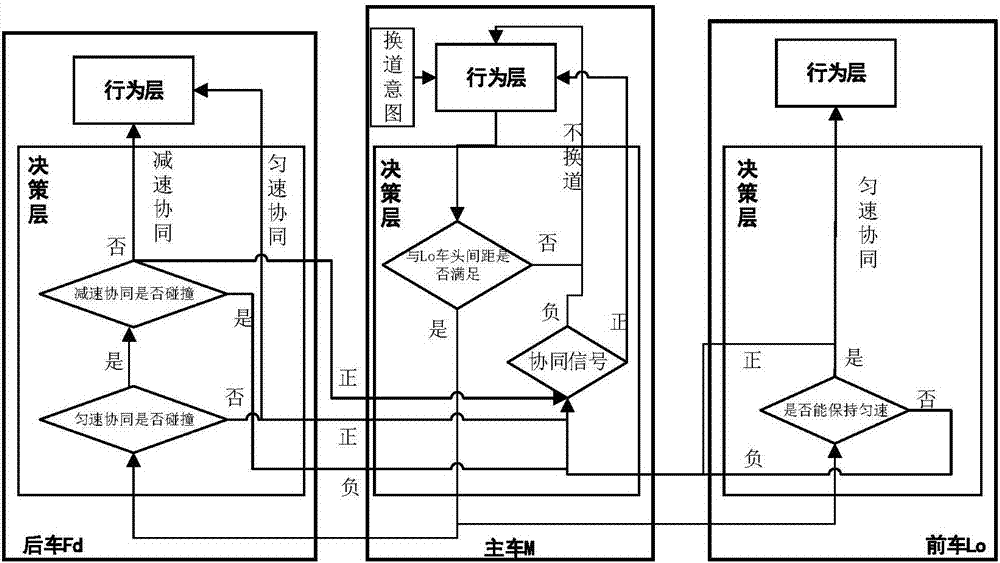
[0054] In the first step, the main vehicle sends a lane-changing request before changing lanes, and establishes the criteria for whether the surrounding vehicles accept the lane-changing request after receiving the lane-changing request signal sent by the main vehicle:
[0055] Car behind the current lane F o , the vehicle in front of the target lane L d If the current speed is kept at a constant speed and will not collide with the main vehicle, then accept the main vehicle’s lane change request and keep driving at the current speed until the main vehicle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com