Virtual-reality occlusion handling method based on depth image data flow
A technology of virtual and real occlusion and processing methods, which is applied in image data processing, 3D image processing, image enhancement, etc., and can solve problems such as time-consuming, lack of 3D information of real scenes, and difficult to deal with the occlusion relationship between virtual objects and real scenes. Achieving improved accuracy and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
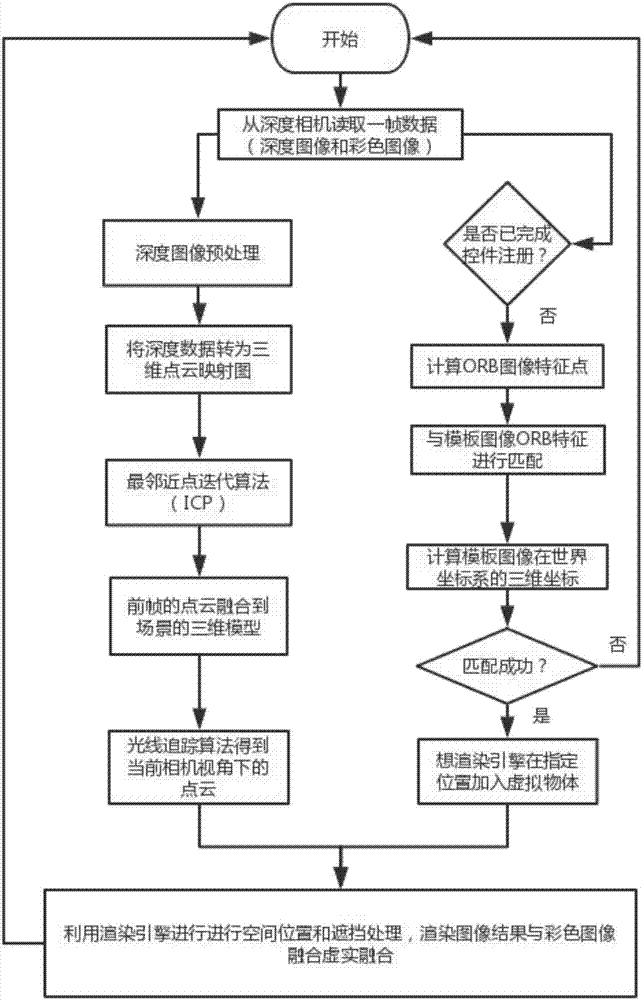
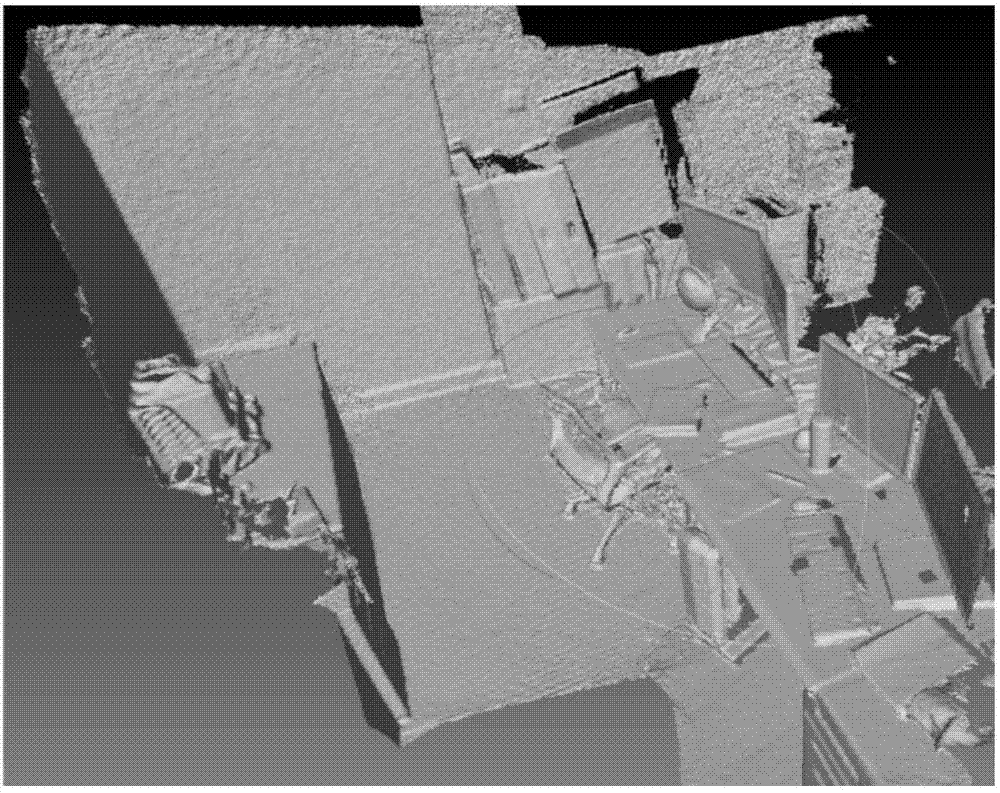
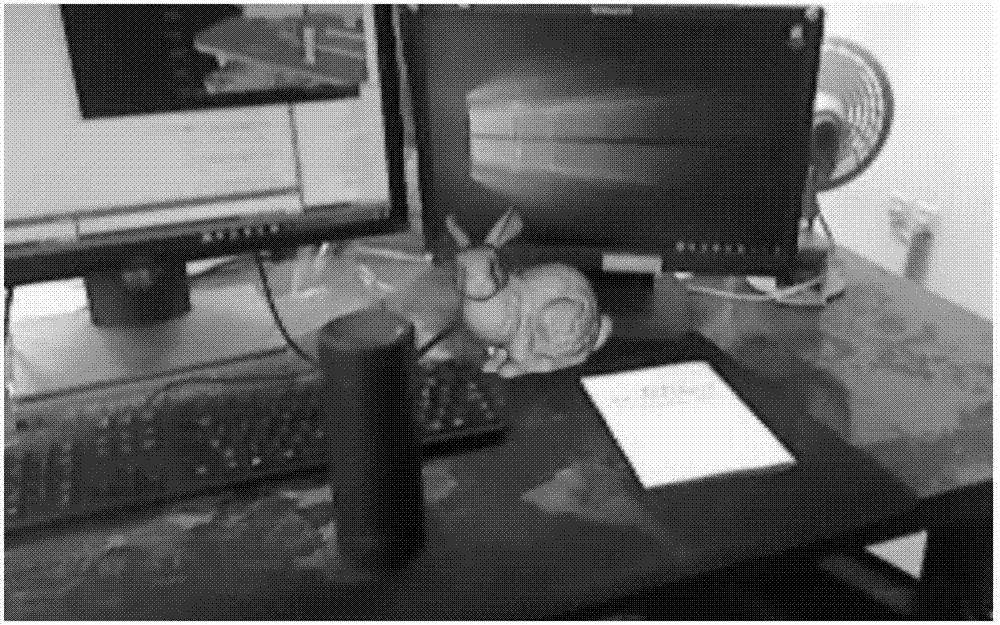
[0024] Such as figure 1 As shown, the implementation process of the present invention is mainly divided into four steps: depth data preprocessing, building a 3D point cloud model of a scene, 3D space registration, and virtual-real fusion rendering.
[0025] Step 1. In-depth data preprocessing
[0026] Its main steps are:
[0027] (11) For the depth data in the given input RGBD (color + depth) data stream, set the threshold w according to the error range of the depth camera min ,w max , the depth value is at w min with w max The points between are regarded as credible values, and only the depth data I within the threshold range are kept.
[0028] (12) Perform fast bilateral filtering on each pixel of the depth data, as follows:
[0029]
[0030] where p j for pixel p i The pixels in the neighborhood of , s is the number of effective pixels i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com