An upper extremity exoskeleton mechanical assist device
A technology of mechanical assist and exoskeleton, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of limited installation space, portability requirements, poor power/volume-mass ratio, and failure to be widely used, and achieve a good market. The effect of promotion value, low cost and practical function
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
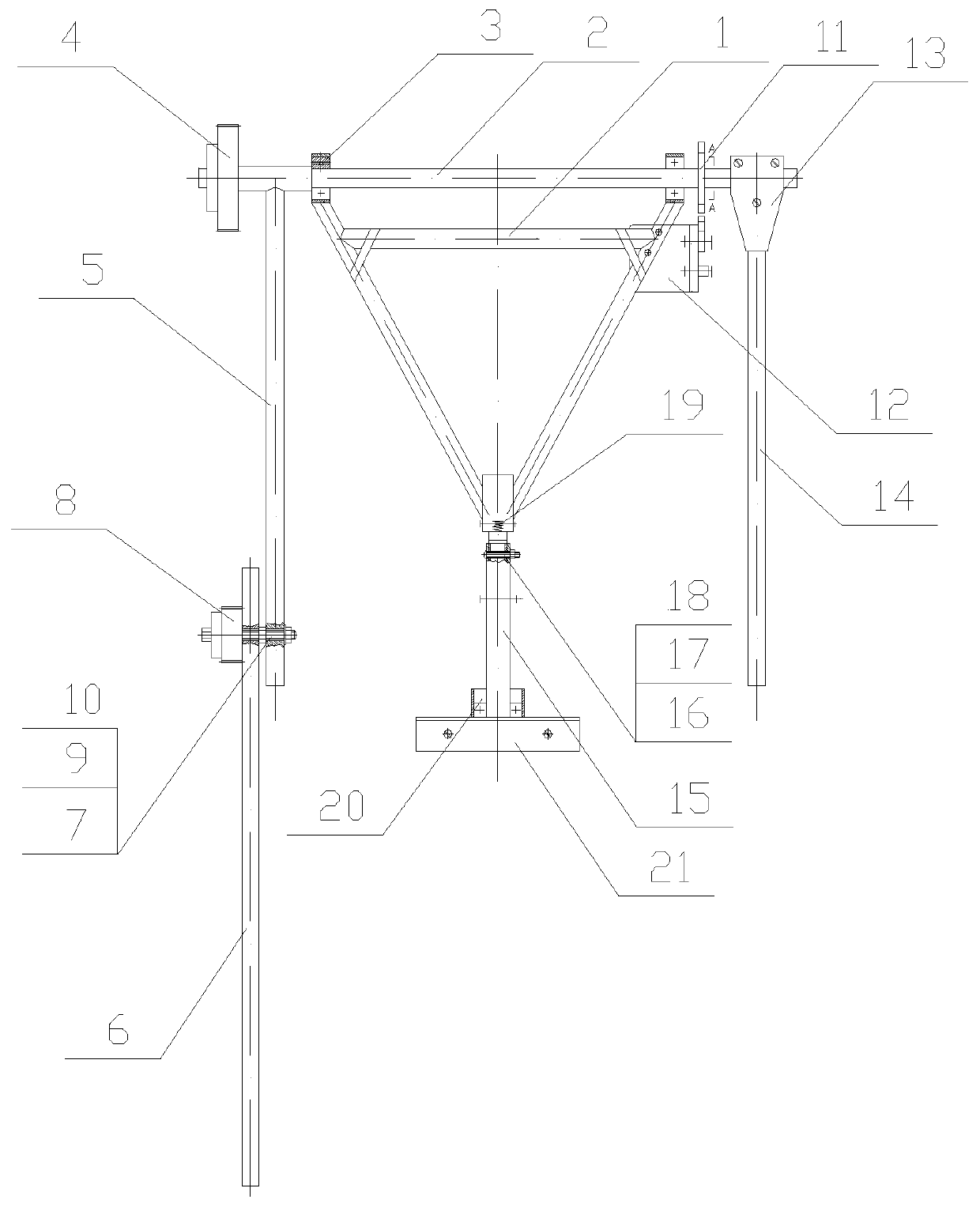
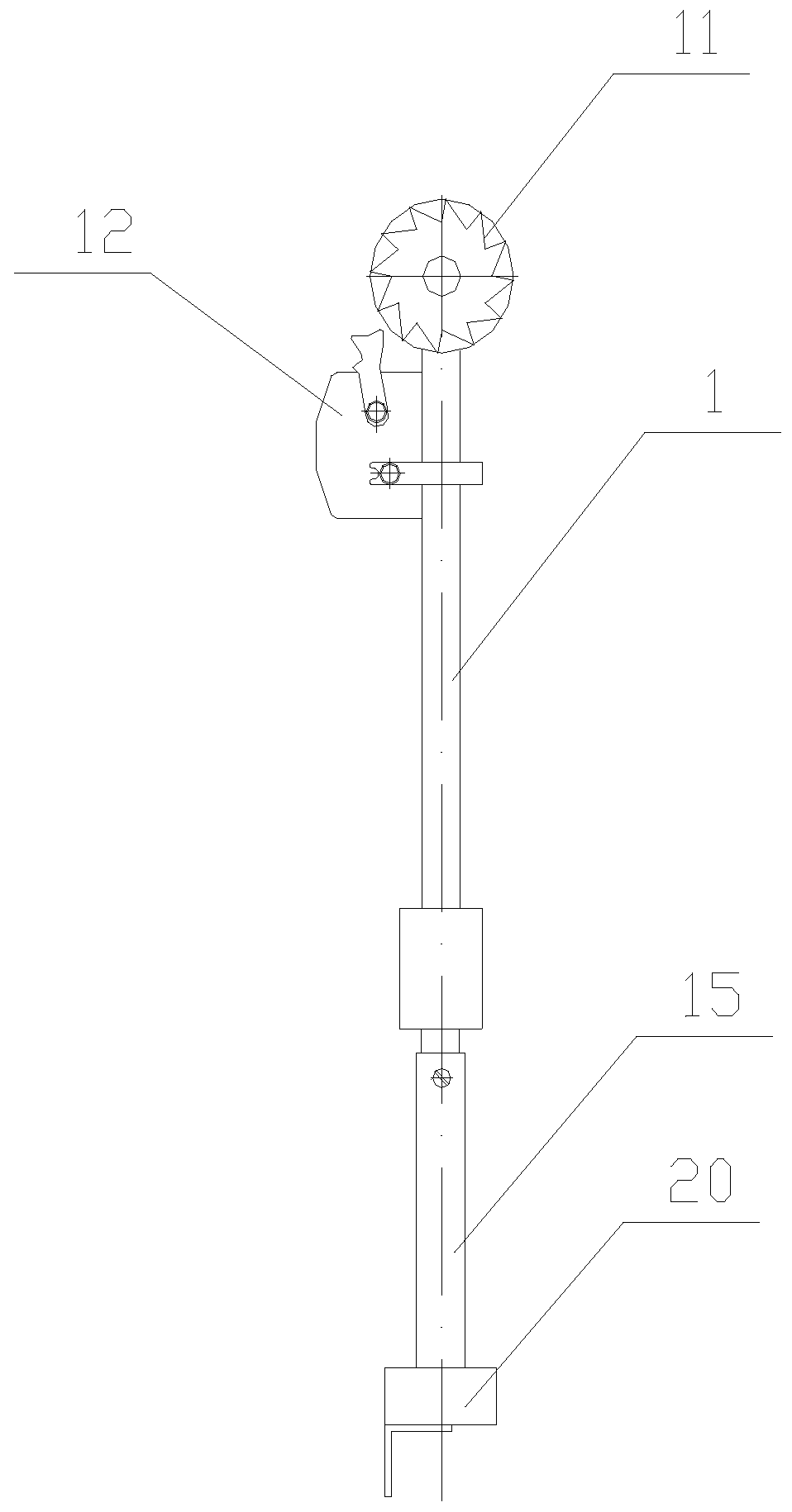
[0011] Such as figure 1 , figure 2 As shown, this specific embodiment adopts the following technical solutions: it includes a tripod 1, a linkage shaft 2, a bearing 3, a large synchronous toothed wheel 4, a right arm 5, a right arm 6, a long bolt 7, a synchronous small Toothed wheel 8, first nut 9, first washer 10, ratchet 11, ratchet seat 12, connecting piece 13, left boom 14, telescopic tube 15, bolt 16, second nut 17, second washer 18, The spring 19, the bearing 20, and the base 21 are provided with a linkage shaft 2 above the tripod 1. Bearings 3 are installed at both ends of the linkage shaft 2, and the bearings 3 at both ends are set on the upper sleeve of the tripod 1, the linkage shaft The right end of 2 is equipped with a large synchronous toothed wheel 4, the upper end of the right arm 5 is fixedly connected with the right end of the linkage shaft 2, and the lower end of the right arm 5 and the right forearm 6 are fixedly connected by a long bolt 7. The long bolt On...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com