Software gas driving hand rehabilitation device
A rehabilitation device and hand technology, applied in medical science, passive exercise equipment, diagnosis, etc., can solve the problems of insecurity, uncomfortable wearing, and cumbersome rigid exoskeleton robot, and achieve low price, comfortable wearing, and improved effect. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
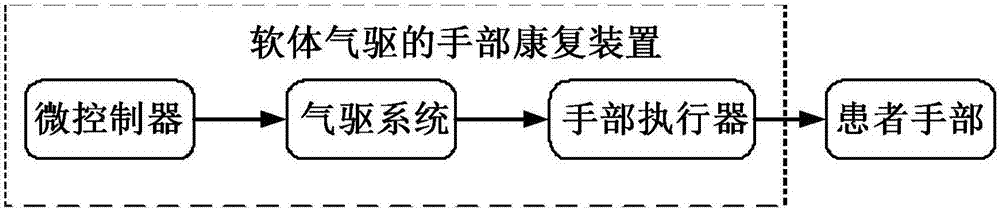
[0026] This disclosure proposes a soft air-driven hand rehabilitation device with a hand actuator as the controlled object, an Arduino UNO with high performance and low power consumption as the microcontroller, and a micro-vacuum pump as the driver. Because of the inherent softness, elasticity, and lightness of soft materials, the hand rehabilitation device made of soft materials is more lightweight, comfortable, small in size, easy to wear and carry, and high in safety.
[0027] In order to make the purpose, technical solutions and advantages of the present disclosure clearer, the present disclosure will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
[0028] The soft air-driven hand rehabilitation device of the embodiment of the present disclosure, such as figure 1 As shown, the hand rehabilitation device includes: a microcontroller, an air drive system, and a hand actuator.
[0029] The hand ac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com