Dispersed neural robust controlled trajectory tracking algorithm for mechanical arm
A neural robust and trajectory tracking technology, applied in the field of robotics, can solve problems such as large training volume, large control energy, and increased calculation volume, and achieve the effect of improving tracking accuracy and eliminating disturbances
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0048] The embodiments of the present invention will be described in detail below with reference to the accompanying drawings, but the present invention can be implemented in many different ways defined and covered by the claims.
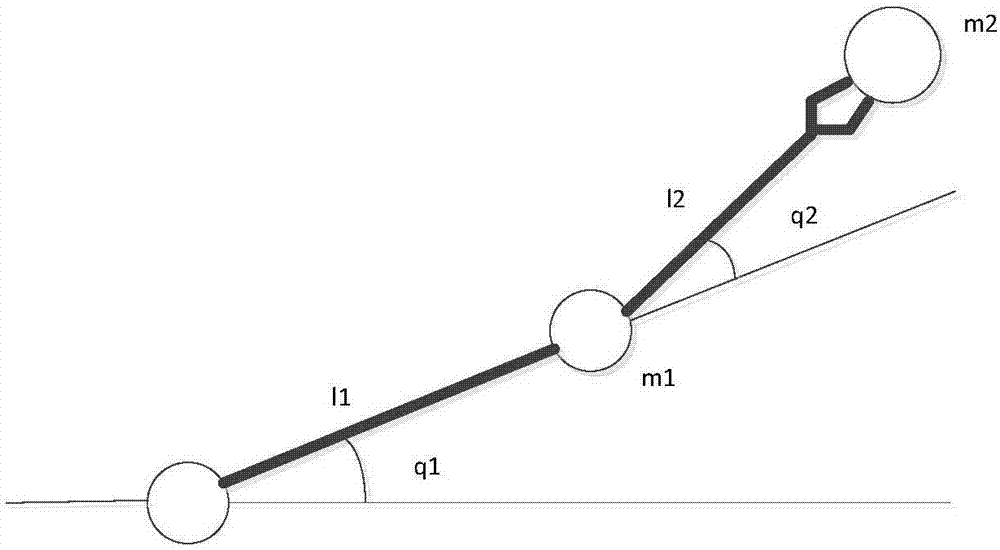
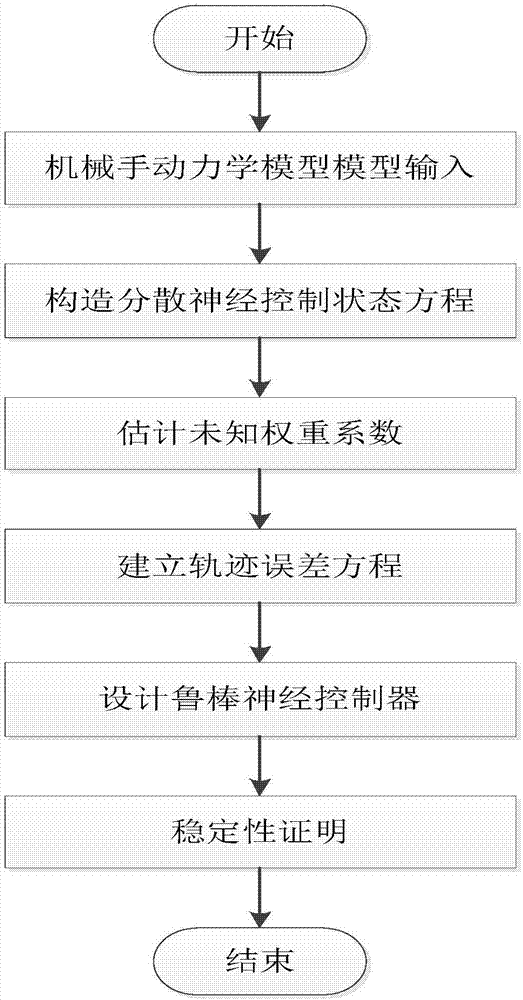
[0049] As shown in the attached figure, for the dynamic model of the manipulator, considering that directly constructing the neural network model for the whole often requires a large amount of calculation, a decentralized recursive neural network model is designed to construct the state equation for each joint of the manipulator , and then design the controller, by adding a robust item in the control rate to offset the mutual disturbance and modeling error between the neural controllers, and finally prove the stability of the designed controller.
[0050] (1) High-order recurrent neural network (RHONN) model construction. The output of the current sequence of the recurrent neural network (RNN) is related to the previous output, that is to say, the n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com