Cable taking-up and paying-off device and cable taking-up and paying-off method for wire control robot
A technology of wired control and retractable device, which is applied in the field of robots, can solve problems such as affecting cable release, difficulty in retracting, manual operation, etc., to achieve orderly retraction, stable and reliable cable release and retraction, and stable transmission.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
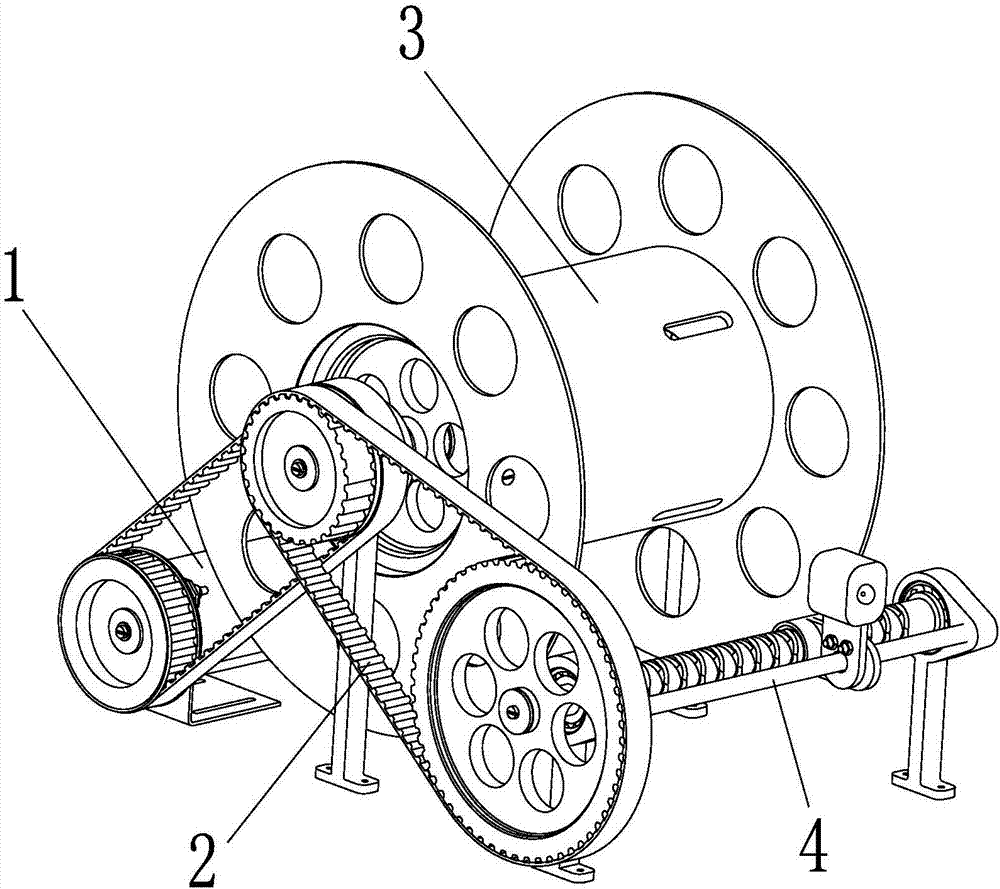
[0055] Such as figure 1 As shown, the cable retractable device for a wired control robot of the present invention includes a cable retractable motor 1 and a synchronous belt transmission mechanism 2 connected to the output shaft of the cable retractable motor 1, and is connected to the synchronous belt transmission mechanism 2. The connected cable winding mechanism 3 and the cable arrangement mechanism 4;
[0056] to combine figure 2 , the synchronous belt transmission mechanism 2 includes a main drive synchronous pulley 2-1, a reel drive synchronous pulley 2-3 and a lead screw drive synchronous pulley 2-5, the main drive synchronous pulley 2-1 and the reel A reel drive synchronous belt 2-2 is bridged on the reel drive synchronous pulley 2-3, and a lead screw drive synchronism is bridged on the reel drive synchronous pulley 2-3 and the lead screw drive synchronous pulley 2-5. Belt 2-4, the main drive synchronous pulley 2-1 is fixedly connected to the output shaft of the cab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com