Generation method and device for decision network model of vehicle automatic driving
An automatic driving and network model technology, applied in the computer field, can solve the problems of weak vehicle decision-making model learning ability, inability to adapt to different routes and scenarios, and low efficiency of decision-making model training, so as to improve learning ability and generalization Ability, the effect of rapid training
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0023] figure 1 It shows the implementation process of the method for generating the decision network model for automatic driving of vehicles provided by Embodiment 1 of the present invention. For the convenience of description, only the parts related to the embodiment of the present invention are shown, and the details are as follows:
[0024] In step S101, according to the vehicle state information collected at each test time, the preset vehicle action set and the preset reward-reward function, a sample triplet corresponding to each test time is generated.
[0025] The present invention is applicable to an interactive platform established based on a racing simulation platform or a racing simulator (for example, TORCS, The open racing car simulation), on which an interactive driving test of an unmanned vehicle is performed. In the current interactive test process, the vehicle status information is collected through multiple preset sensors on the vehicle. The vehicle status in...
Embodiment 2
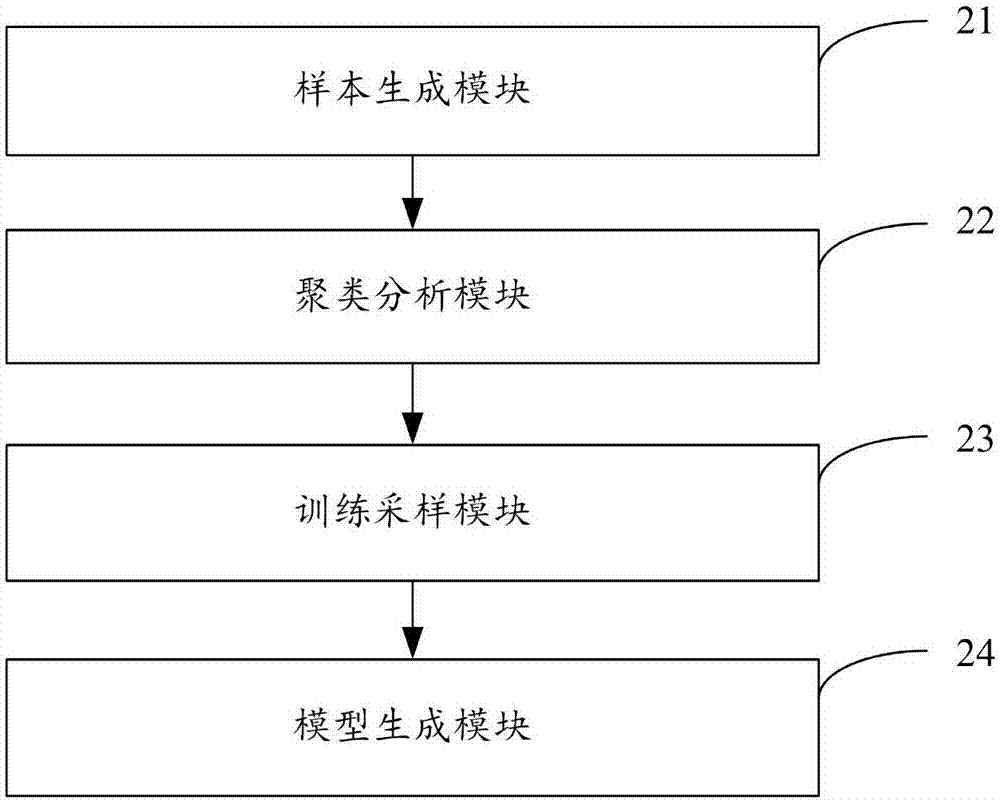
[0048] figure 2 The structure of the device for generating the decision network model for automatic driving of vehicles provided by Embodiment 2 of the present invention is shown. For the convenience of description, only the parts related to the embodiment of the present invention are shown, including:
[0049] The sample generation module 21 is configured to generate a sample triplet corresponding to each test time according to the vehicle state information collected at each test time, the preset vehicle action set and the preset reward-reward function.
[0050] In the embodiment of the present invention, after collecting the vehicle state information at the current test moment, according to the preset reward reward value function, traverse the preset vehicle action set to find the action that can obtain the maximum reward value, that is, the maximum reward value action, A sample triplet is composed of the vehicle state information, the maximum reward value action, and the r...
Embodiment 3
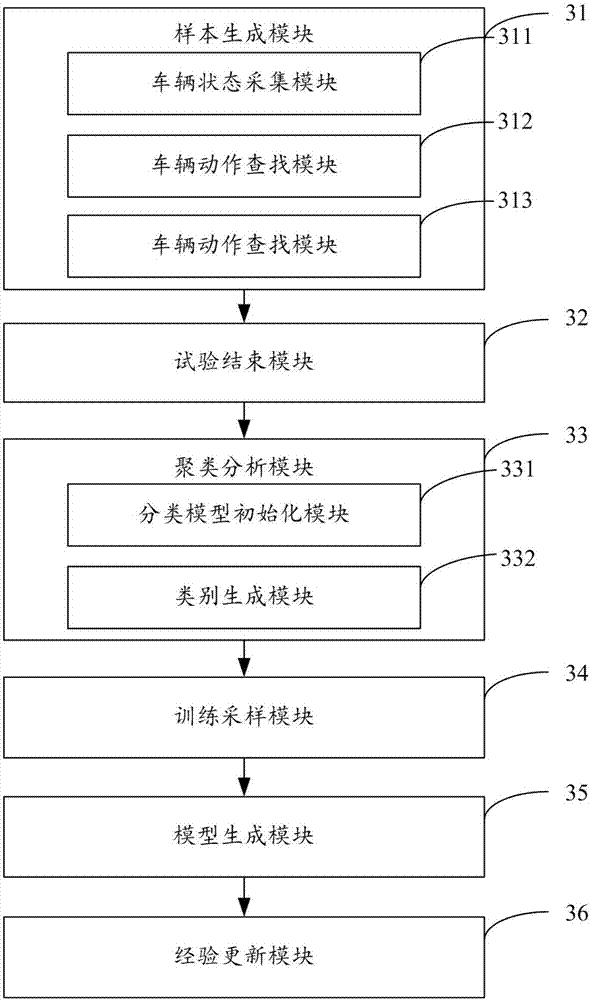
[0059] image 3 The structure of the device for generating a decision network model for automatic driving of vehicles provided by Embodiment 3 of the present invention is shown, which includes:
[0060] The sample generation module 31 is configured to generate a sample triplet corresponding to each test time according to the vehicle state information collected at each test time, a preset vehicle action set and a preset reward-reward function.
[0061] In the embodiment of the present invention, after collecting the vehicle state information at the current test moment, according to the preset reward reward value function, traverse the preset vehicle action set to find the action that can obtain the maximum reward value, that is, the maximum reward value action, A sample triplet is composed of the vehicle state information, the maximum reward value action, and the reward value of the maximum reward value action.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com