Rolling-feet type intermittent hopping robot capable of adjusting posture in the air and recycling landing energy
An energy recovery and robot technology, applied in the field of robots, can solve the problems of the robot not having a reset function, a low jump height, and a single jump function.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
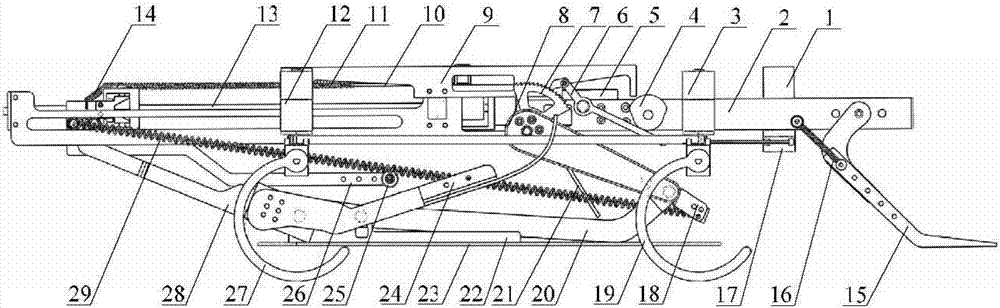
[0036] This embodiment is a foot-rolling intermittent bouncing robot capable of attitude adjustment in the air and energy recovery on the ground.
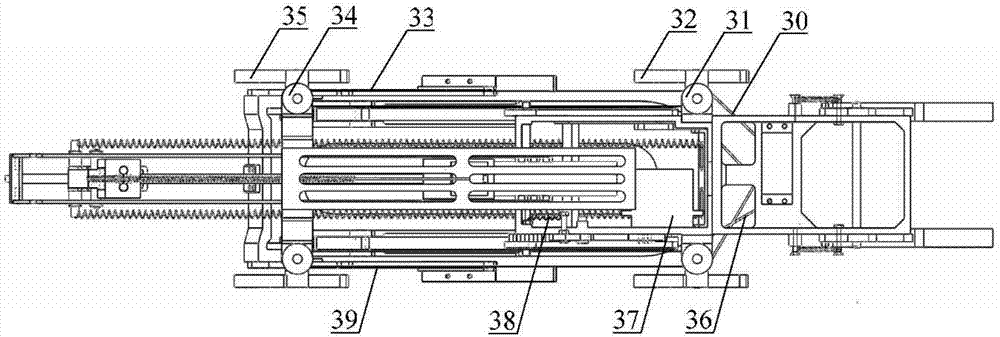
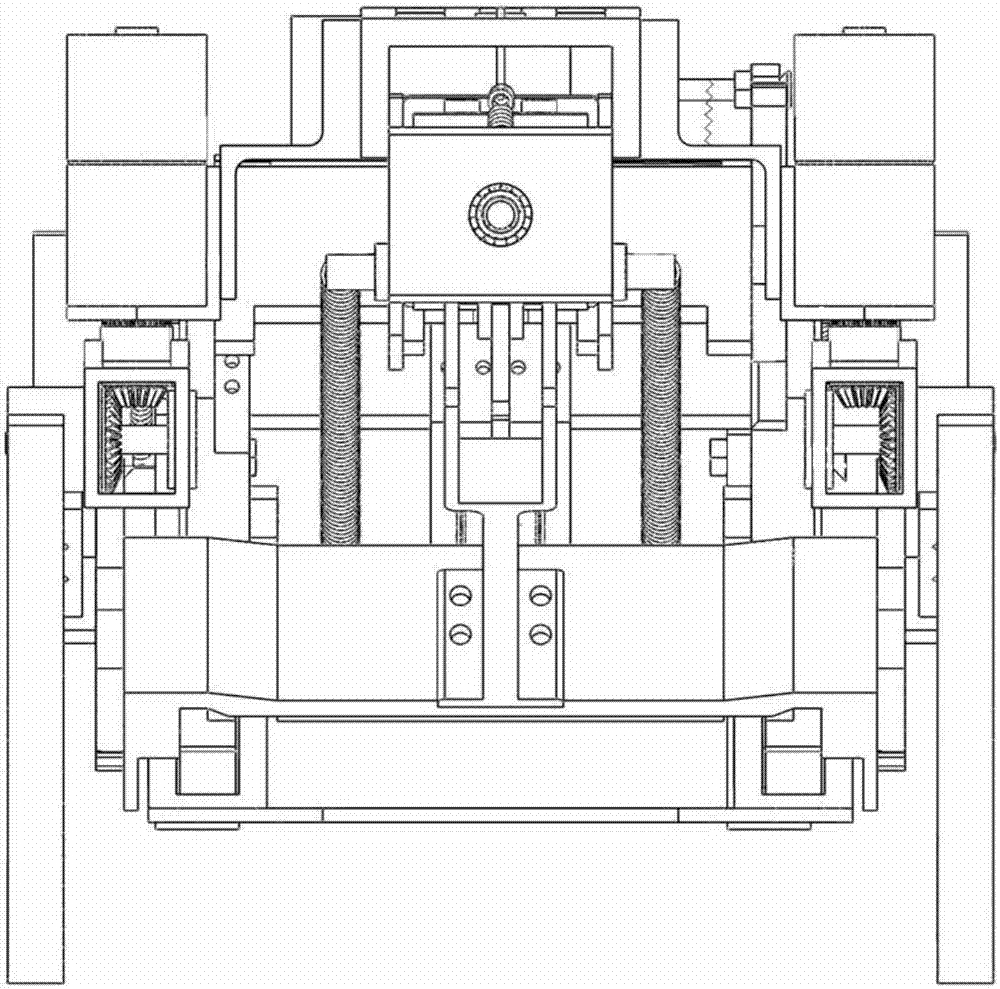
[0037] refer to Figure 1 to Figure 18 In this embodiment, the foot-rolling intermittent bouncing robot capable of attitude adjustment in the air and energy recovery on the ground is composed of a jumping mechanism, an attitude adjustment in the air and a landing buffer, an energy recovery mechanism, and a reset, steering, and rolling integrated arc leg mechanism; in the jumping mechanism Among them, the servo motor 5 and the trapezoidal screw mandrel 13 are installed inside the trunk 2, and the two ends of the trapezoidal screw mandrel 13 are equipped with deep groove ball bearings, and the output shaft of the servo motor 5 is connected with one end of the trapezoidal screw mandrel 13 by a coupling. The split nut device is installed on the trapezoidal screw rod 13, the trapezoidal screw rod 13 is covered with a copper sleeve and p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com