Robot path planning system based on memristive cross array and q-learning
A cross-array and path planning technology, applied in the field of memristive cross-array and reinforcement learning, can solve problems such as slow convergence speed and long machine learning time, and achieve the effects of improving flexibility, avoiding state explosion problems, and reducing learning time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will be described in detail in conjunction with the accompanying drawings and specific embodiments, and the description here does not mean that all the subjects corresponding to the specific examples stated in the embodiments are in cited in the claims.
[0040] Compared with the prior patent application 201210188573.2, the technical solution disclosed in the present invention mainly proposes two improvements;
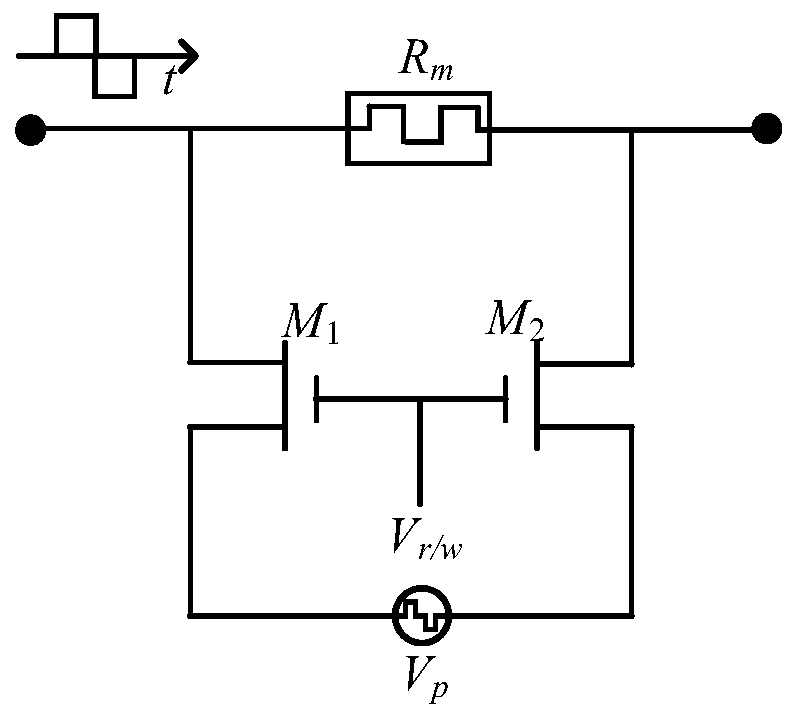
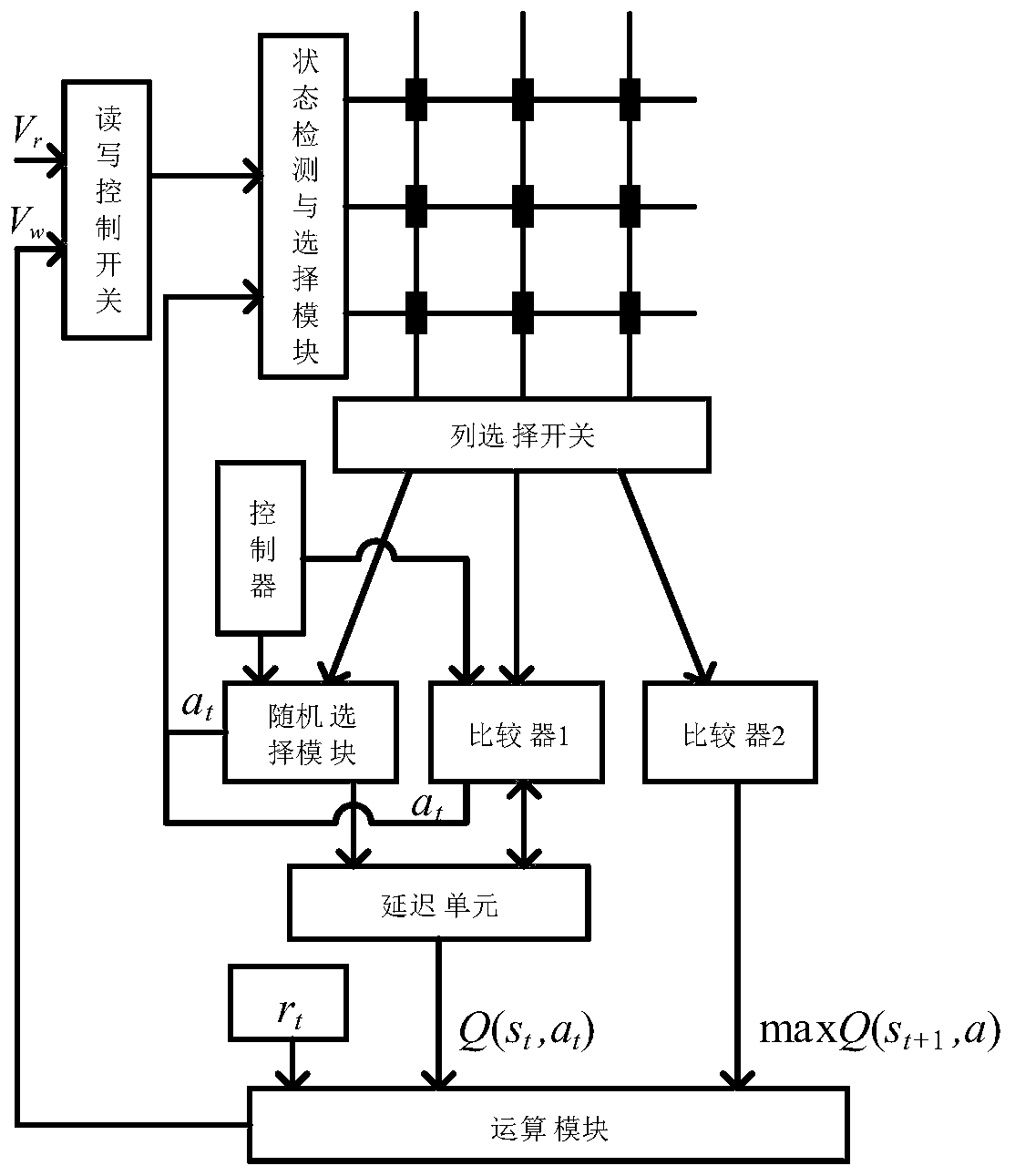
[0041] (1) On the basis of improved Q-learning (Q learning), introduce and combine the memristive cross array to store the Q value;
[0042] (2) Based on the improved Q-learning and memristive cross array, the robot path planning is realized.
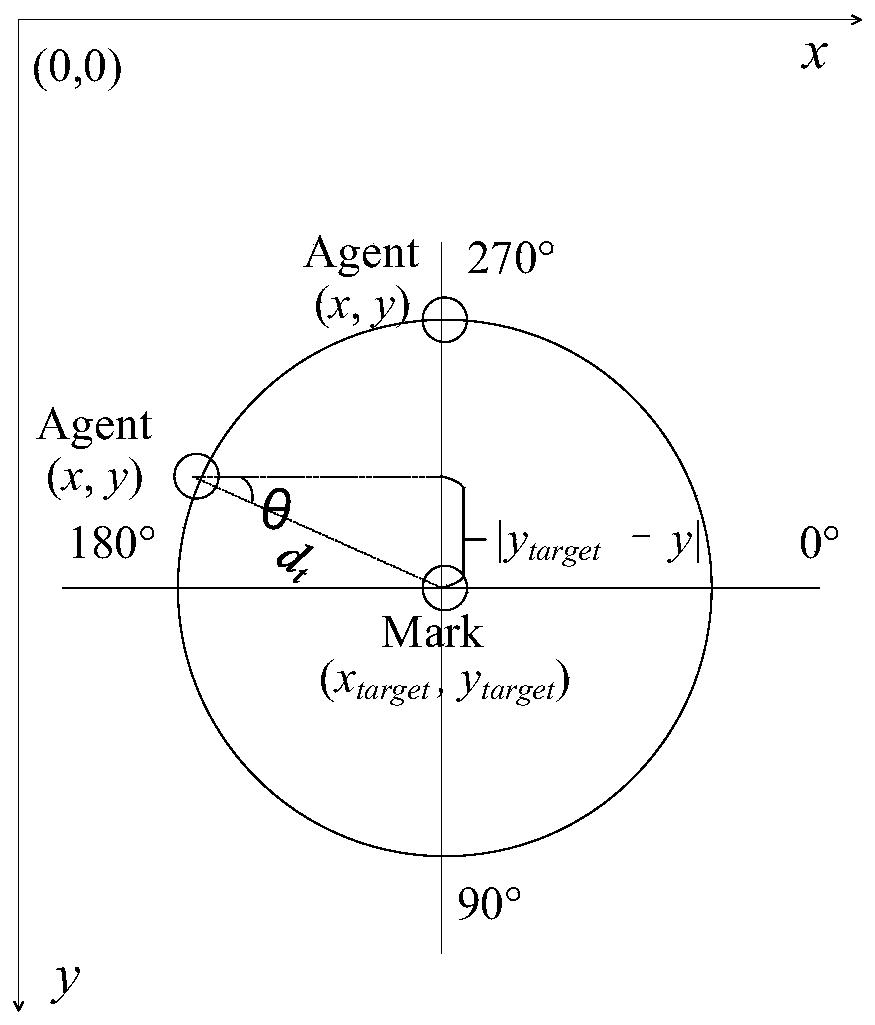
[0043] Specifically, the robot perceives the current state s through the environmentt ∈S (S represents the set of all states), and execute the corresponding action a t ∈A (A represents...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com