Improved particle swarm optimization-based mobile robot path planning method
A technology for mobile robots and improved particle swarms, applied in instruments, artificial life, non-electric variable control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0096] The present invention will be further described below in conjunction with drawings and embodiments.
[0097] The mobile robot path planning method based on improved particle swarm optimization of the present invention comprises the following steps:
[0098] Step 1. Workspace modeling
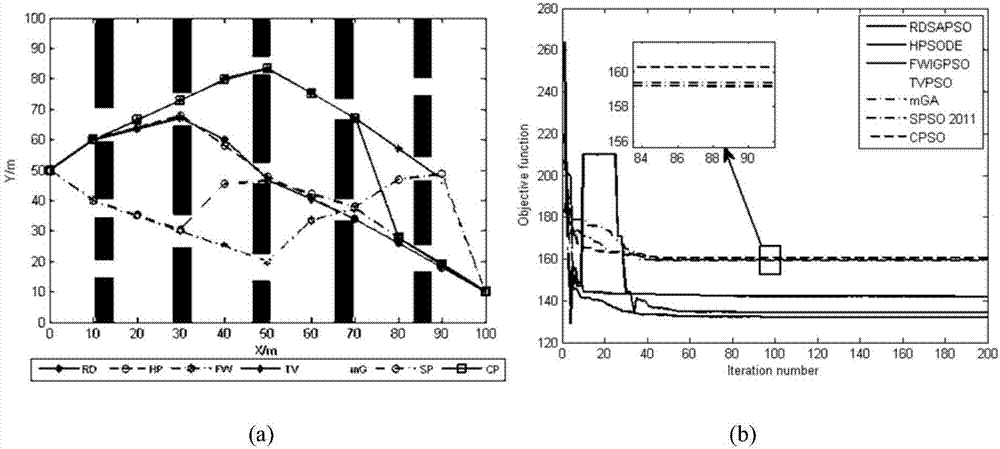
[0099] Model the workspace as figure 1 As shown, a global coordinate system o-xy is established, where st and ta represent the starting and destination positions of the robot, respectively. In order to reduce the dimension of the decision variable, the principle of coordinate transformation is used to locate the new x’-axis, when st-ta intersects with the x-axis, the x’-axis is consistent with the line st-ta, as follows
[0100]
[0101] where α is the counterclockwise rotation angle from the x-axis to the line st-ta, (x st ,y st ) is the starting position of the robot in o-xy. (x',y') is the point corresponding to (x,y) in the new coordinate system st-x'y'. In st-x'y', the line ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com