Wearable robot skin based on multiple layers of air bags
A multi-layer airbag and robot technology, applied in manipulators, manufacturing tools, etc., can solve the problems of high cost, easy damage, and difficult application, and achieve the effect of low cost, high reliability, and small weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] Below by embodiment and in conjunction with accompanying drawing, the present invention will be further described:
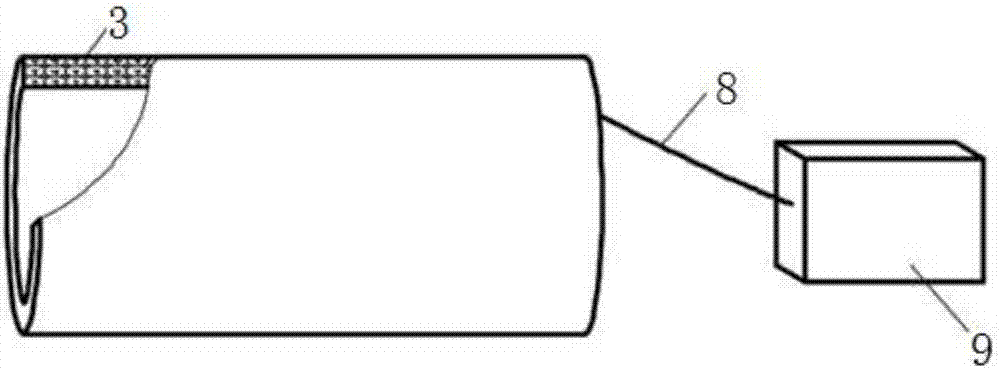
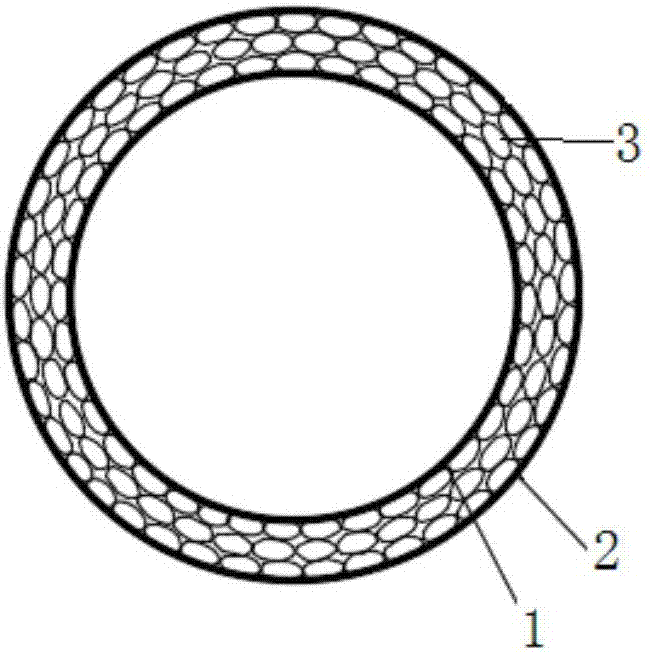
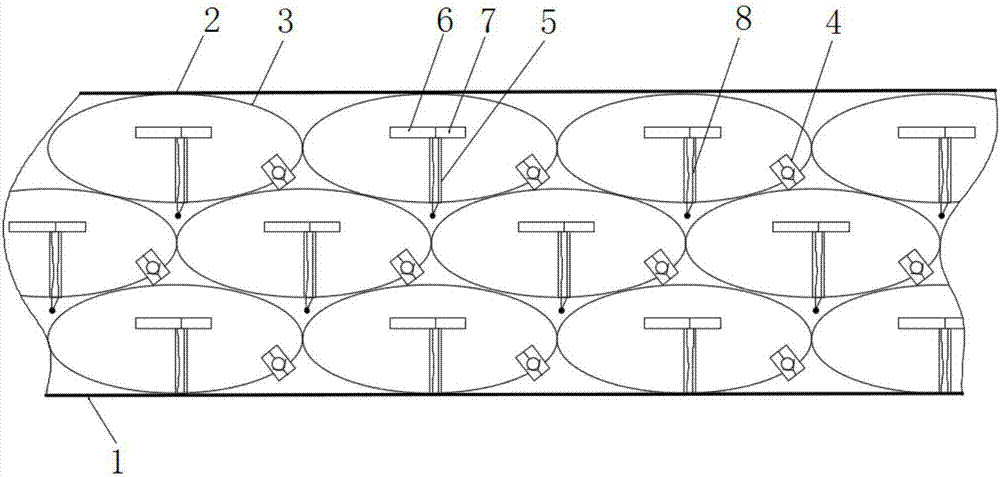
[0013] to combine figure 1 — image 3 As shown, a wearable robot skin based on multilayer airbags is mainly composed of an installation layer 1, an epidermal layer 2, an airbag 3, a one-way valve 4, a flexible support frame 5, a pressure sensor 6, a temperature sensor 7, a connecting wire 8, The data collection equipment consists of 9 components.
[0014] The installation layer 1 is used to be in close contact with the robot body, and several layered airbags 3 are interposed between the skin layer 2 and the installation layer 1, and are wrapped by the skin layer 2 and the installation layer 1.
[0015] Both the installation layer 1 and the skin layer 2 are made of flexible materials, and each airbag 3 is equipped with a one-way valve 4 through which the airbag 3 is filled with gas. Each airbag 3 is provided with a flexible support frame 5 for mounting ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com