Magnetic combined navigation method of AGV (automated guided vehicle)
A navigation method and magnetic combination technology, applied in the field of mobile robots, can solve the problems of poor AGV tracking process stability and track tracking accuracy, difficult debugging, and long development cycle, so as to improve resource utilization, improve detection strength, and enhance The effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
[0025] A kind of AGV magnetic combination navigation method of the present invention, comprises the following steps,
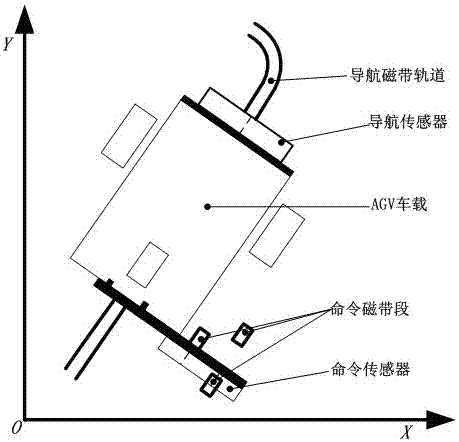
[0026] S1. Provide a navigation sensor for sensing the navigation tape, a command sensor for sensing the command tape (both the navigation sensor and the command sensor are magnetic sensors); combine multiple sections of magnetic tape into a functional command, and combine the command with the command in the command During the interval, tapes are laid crosswise, and the same sampling point of the navigation sensor or command sensor is not continuously laid with navigation tapes or command tapes of the same polarity; among them, such as figure 1 As shown in , the navigation tape is laid to form a navigation tape track, (the navigation tape and the command tape are both types of magnetic tape, that is, a strip material with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com