Three-degree-of-freedom forelimb rehabilitation robot based on parallel mechanism
A technology of rehabilitation robot and degree of freedom, which is applied in the direction of manipulators, passive exercise equipment, program-controlled manipulators, etc. It can solve the problems of unstable machine structure, large working space, and high labor intensity, and achieve compact structure, smooth movement, and control. high precision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
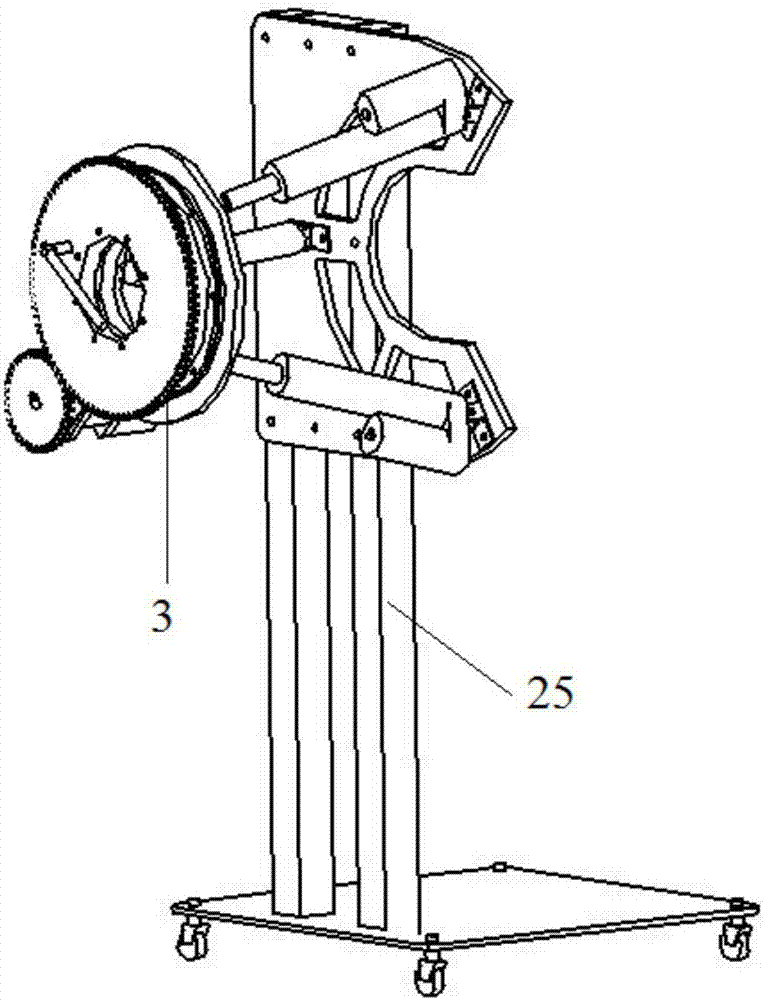
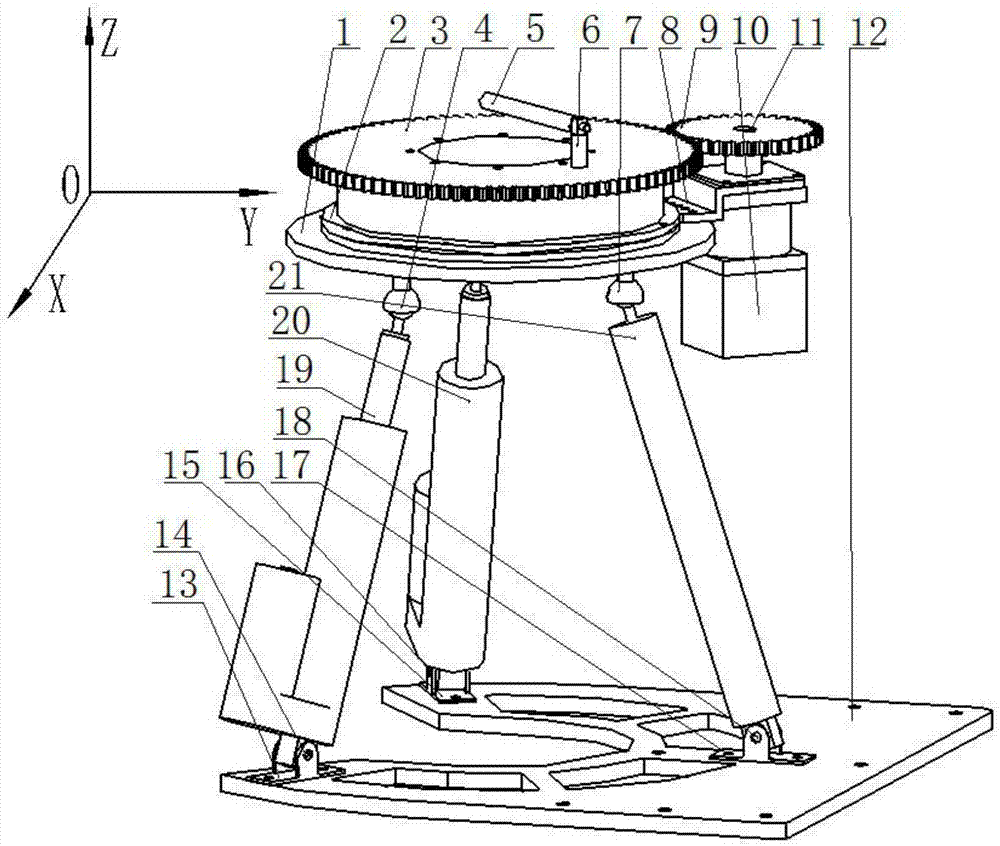
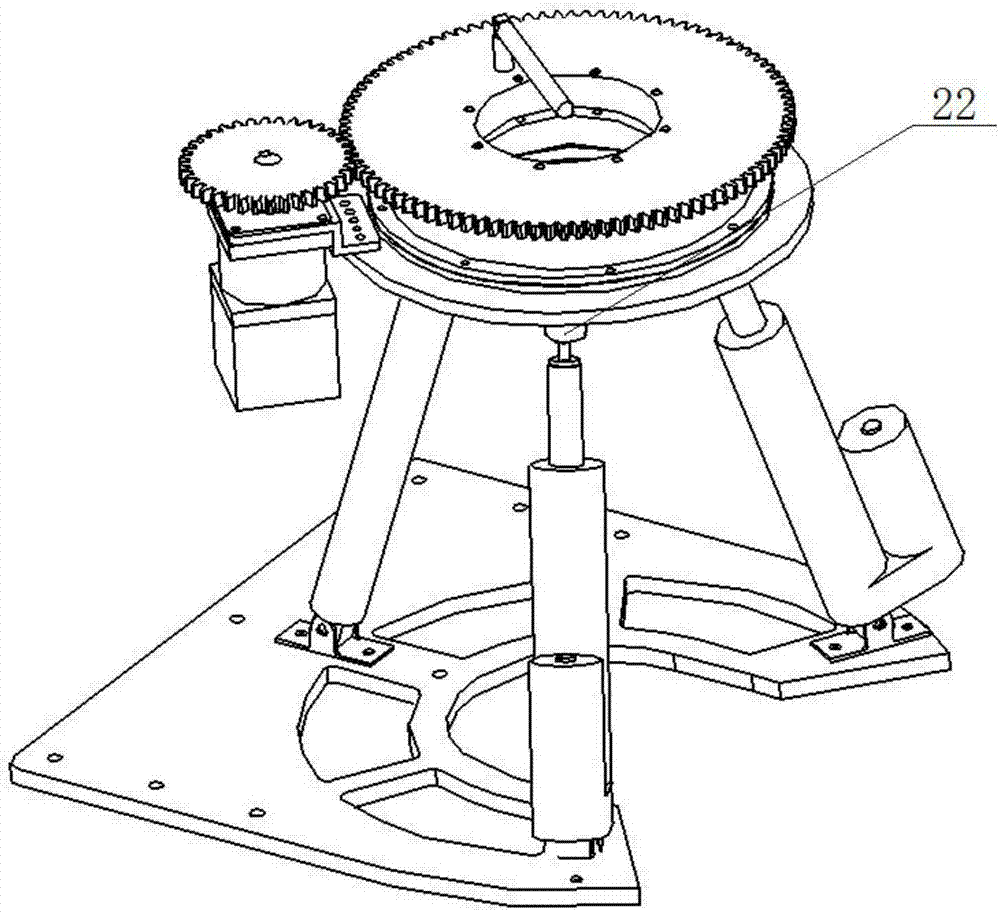
[0025] The present invention is achieved through the following schemes: a three-degree-of-freedom forelimb rehabilitation robot based on a parallel mechanism, which includes two parts: a main body part and a mounting support; Static platform 12, electric push rod Ⅰ19, electric push rod Ⅱ20, connecting rod 21, large gear 3, small gear 9, input motor 10, handle 5, handle mounting bracket 6, large gear end cover 1, rotating pair mounting seat Ⅰ13, Swivel pair mounting seat Ⅱ16, swivel pair mounting seat Ⅲ17, ball pair Ⅰ4, ball pair Ⅱ7, ball pair Ⅲ22, swivel pair fixed shaft Ⅰ14, swivel pair fixed shaft Ⅱ15, swivel pair fixed shaft Ⅲ18, mounting base plate 30, first bracket 23 , the second bracket 24 , the third bracket 25 and the fourth bracket 26 . During the initial installation, the plane where the large gear 3 is located and the plane where the static platform 12 is located are in a parallel position; and the axis of the central hole of the static platform 12 coincides with t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com