


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Exoskeleton type five-finger-arc-displacement finger rehabilitation training system
A five-finger arc and exoskeleton technology, used in passive exercise equipment, physical therapy and other directions, can solve the problems of neglecting five-finger coordination rehabilitation training, lack of rehabilitation exercise, and unfavorable hand full recovery, so as to facilitate rehabilitation training and prevent secondary Effects of damage, precise position control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
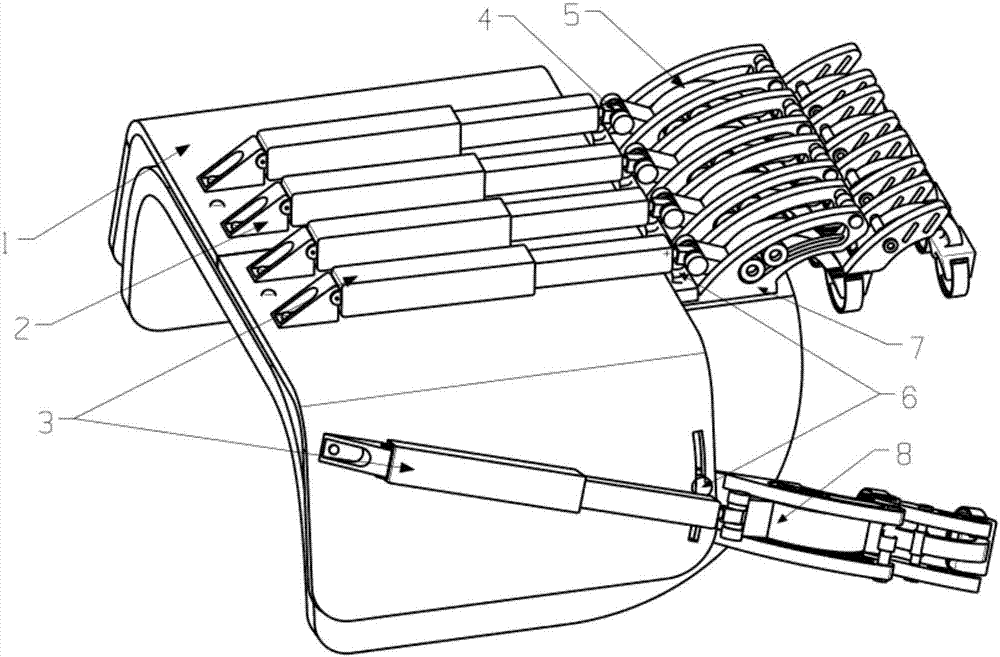
[0025] Embodiment An exoskeleton-type five-finger arc displacement finger rehabilitation training system is used for the patient's finger rehabilitation training. It is driven by a linear push rod motor and cooperates with the far-end connecting rod assembly of the finger to realize the flexion and extension of the two joints of the finger, which is convenient Comprehensive rehabilitation of the patient's fingers.
[0026] Example
[0027] Such as figure 1 , an exoskeleton-type five-finger arc displacement finger rehabilitation training system, including a manipulator fixing plate 1, the lower side arc surface structure of the manipulator fixing plate 1 is used to adapt to the structure of the human hand, fixed on the hand by a bandage, and the upper side plane is used to fix the manipulator The drive system and finger mechanism5.
[0028] Specifically, such as figure 1 , the manipulator drive system adopts five sets of linear push rod motors 3, the front ends of the linear...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com