


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Bus arrival time prediction method
A technology of time prediction and bus, which is applied in the field of intelligent transportation systems, can solve the problems of not being able to use the long-term and short-term variation characteristics of time series, and achieve the effect of ingenious design concept, good application environment and accurate prediction results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
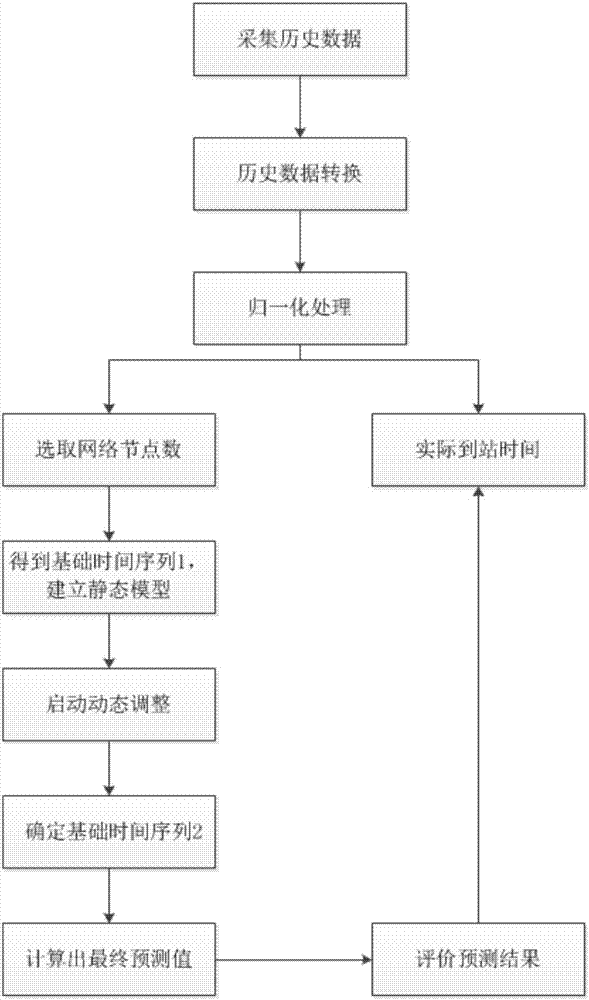
[0036] This embodiment provides a method for predicting the arrival time of buses. First, the static prediction model is used to predict the time that the bus takes to arrive at each station from the departure station, and then the dynamic adjustment model is used to adjust the time according to the observation time of the bus arrival at each station. Static prediction time is dynamically adjusted, specifically including the following steps:
[0037] (1), collect historical data:
[0038] Collection collects the historical data of the bus line by the bus GPS system, the historical data includes the number of trips of each bus, the number of stops, the time and speed of arriving at each station, and the number of trips of the bus is the number of trips of the bus from the origination The process of departing from the station and arriving at the departure station again becomes a train trip;
[0039] (2), historical data conversion:
[0040] Convert the historical data obtained...
Embodiment 2
[0082] The prediction process of this embodiment is the same as embodiment 1. The GPS data of No. 468 bus in Qingdao City from August 3 to August 28 is used to predict the time of the 19 stations that the bus passes through. The data on August 21 is used as a training set, and the data from August 24 to August 28 is used as a test set. Since the operation of buses on weekdays and Saturdays and Sundays is different, this embodiment does not use Saturdays, Saturdays, and Sundays. Sunday’s data is used for training and forecasting, and the division rules of the time period are as follows: from 6:00 am to 21:00 pm, every 30 minutes is divided into a section, and a bus will pass through 19 stops; the final method adopted in this embodiment It is a long-short-term memory recursive neural network with 3 nodes in the input layer, 9 nodes in the hidden layer, and 19 nodes in the output layer. All samples in the training set and test set have been normalized to obtain the bus arrival tim...
Embodiment 3
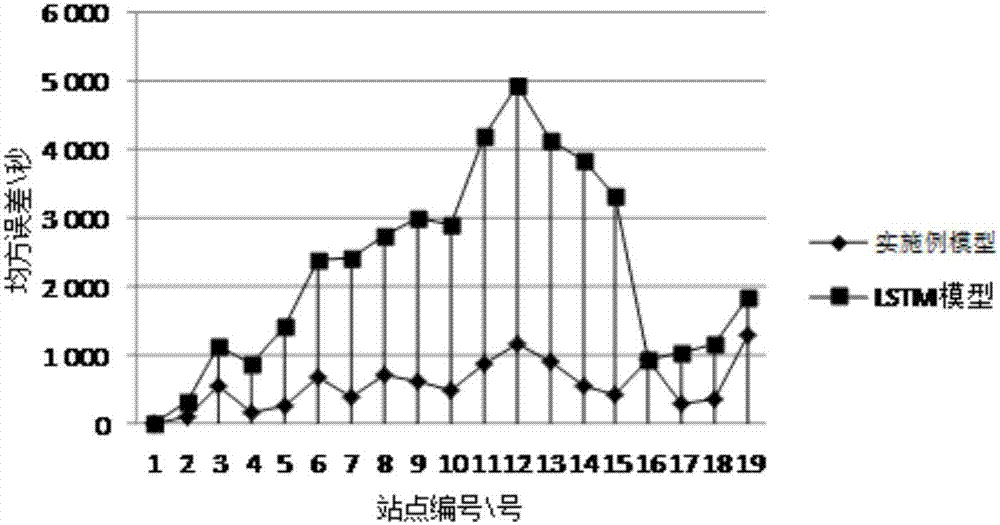
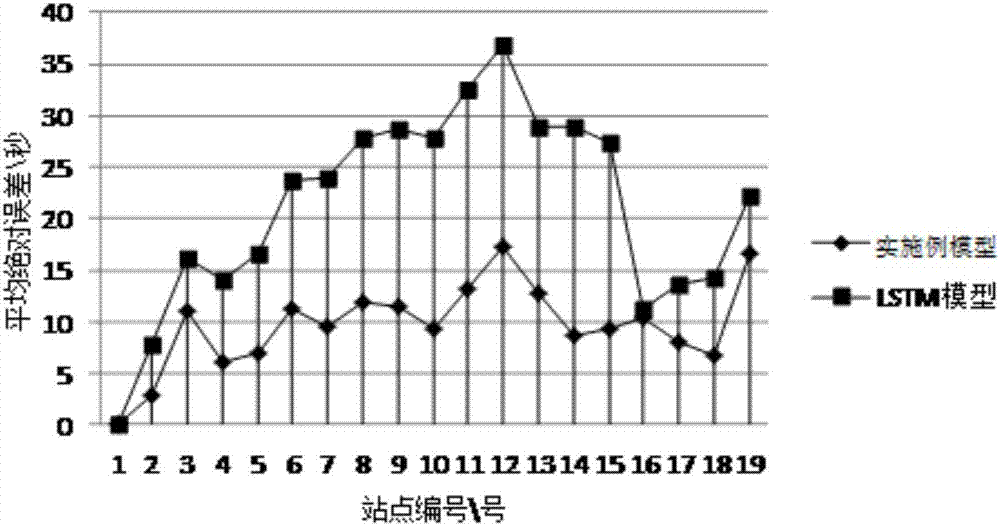
[0088] The prediction process is the same as in Example 1, and the mean square error and average absolute error of each site of the present embodiment and a single LSTM model are as follows figure 2 and image 3 As shown, it can be seen that the mean square error and mean absolute error of the time prediction value adjusted by the Kalman filter model are smaller than the mean square error and mean absolute error of the time predicted by the LSTM model, indicating that the original time baseline is dynamically adjusted by the Kalman filter The prediction accuracy is improved and the prediction bias is reduced.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com