Water surface target detection tracking integration method facing unmanned ship application
A surface target, detection and tracking technology, applied in image analysis, image enhancement, instruments, etc., can solve problems such as untrackable, lost targets, and unmanned boat autonomous obstacle avoidance, etc., to achieve stable detection results and improve accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to explain the present invention, and are not intended to limit the present invention
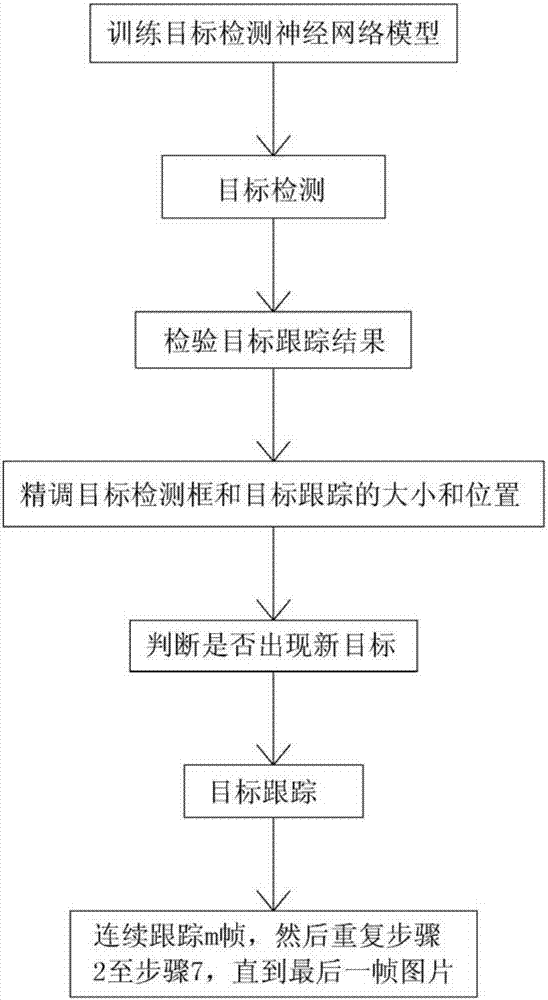
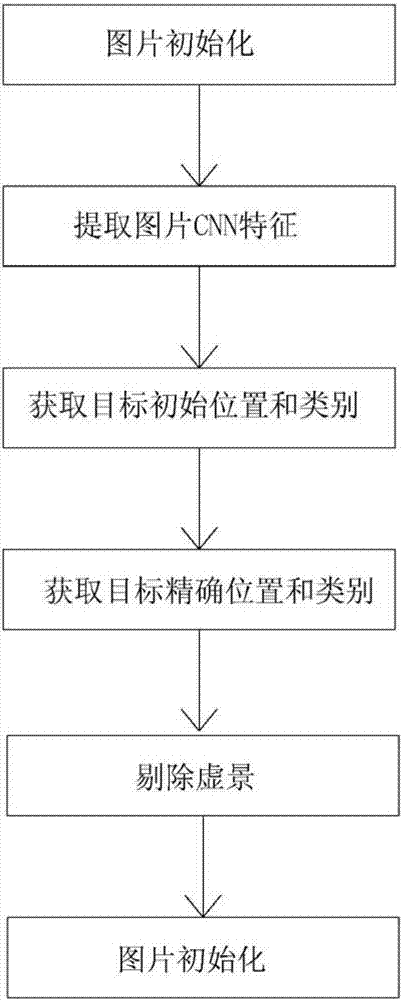
[0055] as attached Figure 1-4 As shown, the present invention discloses an integrated method for surface target detection and tracking for unmanned boat applications, comprising the following steps:
[0056] S1, training the target detection neural network model. In order to solve the training problem, the present invention has produced a data set of common targets on the water surface, a total of 2000 pictures, including 5 types of common targets on the water surface such as riverboats, sailboats, warships, cruise ships, and buoys. At the same time, in order to enhance the stability of the target detection neural network, a total ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com