Repetitive movement planning method for redundancy mechanical arm
A repetitive motion, robotic arm technology, applied in manipulators, complex mathematical operations, program-controlled manipulators, etc., can solve the problems of robotic arm constraints, poor real-time performance, and single constraints, and achieve good real-time performance, fast calculation speed, and robustness. Good results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
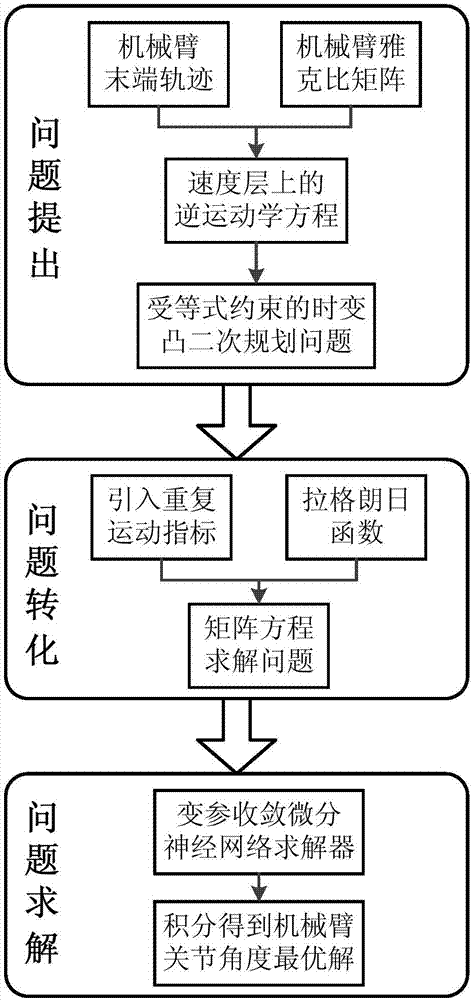
[0047] This embodiment provides a redundant robotic arm repetitive motion planning method based on variable parameter convergence differential neural network, the flow chart is as follows figure 1 As shown, it mainly consists of three parts: problem formulation, problem transformation and problem solving. First, the inverse kinematics equation on the velocity layer is established according to the expected end trajectory of the manipulator and the Jacobian matrix, and the repetitive motion of the redundant manipulator is designed as a time-varying convex quadratic programming problem constrained by the equation, and then through the Lagrangian The equation transforms the quadratic programming problem into a matrix equation problem, and finally solves the matrix equation through a variable parameter convergence differential neural network. Specifically include the following steps:
[0048] 1) Establish the inverse kinematics equation of the redundant manipulator on the velocity...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com