Elephant-nose-imitated robot based on novel under-actuated mechanism
A driving mechanism and underactuated technology, applied in the field of bionic robots, can solve the problems of cumbersome control process, low load capacity, and weak stability, and achieve high application value, large carrying capacity, and strong reconfigurability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in further detail below in conjunction with the accompanying drawings.
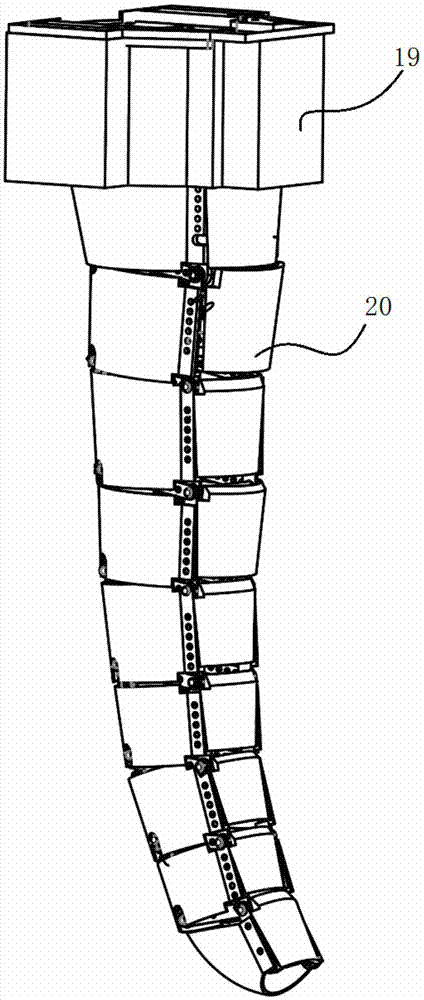
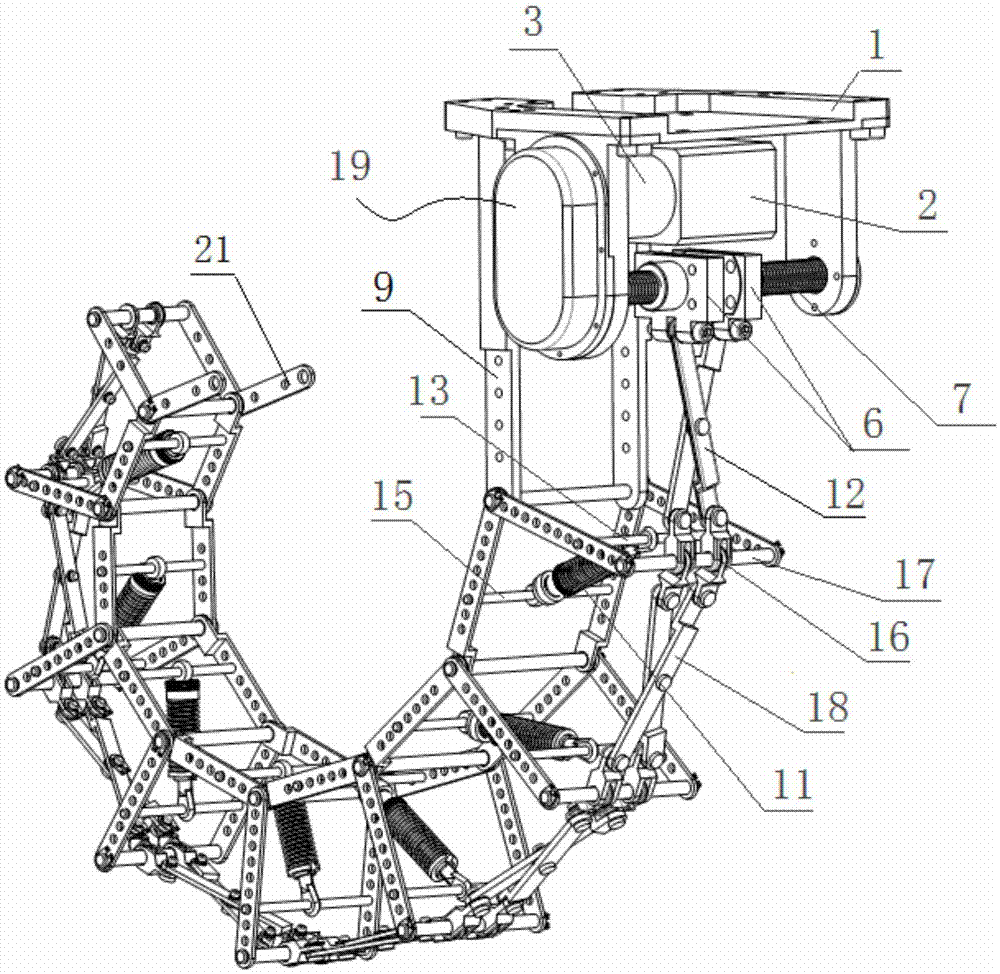
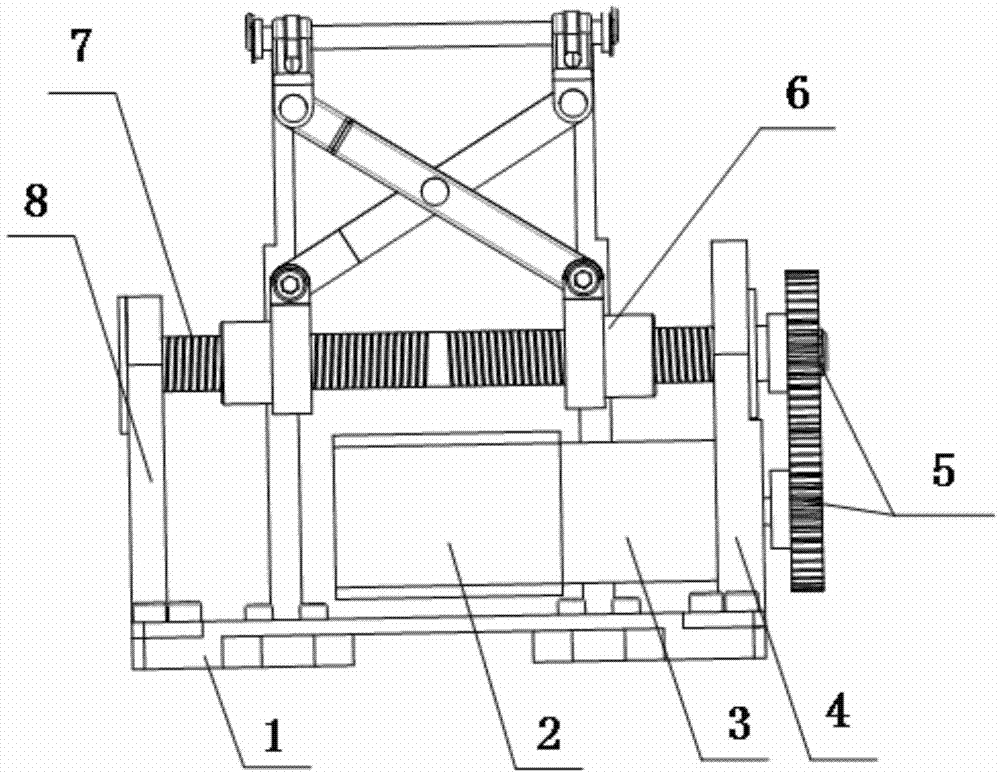
[0027] Such as Figure 1~5 Shown, the present invention comprises driving mechanism 19, connecting scissors mechanism 12 and a plurality of elephant trunk joints 20, wherein on each elephant trunk joint 20, is all provided with linkage scissors mechanism 18, and driving mechanism 19 passes through described connecting scissors Mechanism 12 links to each other with the linkage scissors mechanism 18 on the elephant trunk joint 20 closest to described driving mechanism 19, and the linkage scissors mechanism 18 on each elephant trunk joint 20 links to each other successively, and described connecting scissors mechanism 12 and each linkage scissors The fork mechanism 18 is synchronously opened and closed through the driving mechanism 19, and the width of the side of each elephant trunk section 20 provided with the linkage scissor mechanism 18 is changed by the lin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com