Crawler belt multi-legged mixed type wall-climbing robot device
A wall-climbing robot and a hybrid technology, applied in the field of wall-climbing robots, can solve problems such as poor obstacle-surpassing performance and low travel speed, and achieve the effects of low use and maintenance costs, reduced energy consumption, and novel design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] The following description serves to disclose the present invention to enable those skilled in the art to carry out the present invention. The preferred embodiments described below are only examples, and those skilled in the art can devise other obvious variations. The basic principles of the present invention defined in the following description can be applied to other embodiments, variations, improvements, equivalents and other technical solutions without departing from the spirit and scope of the present invention.
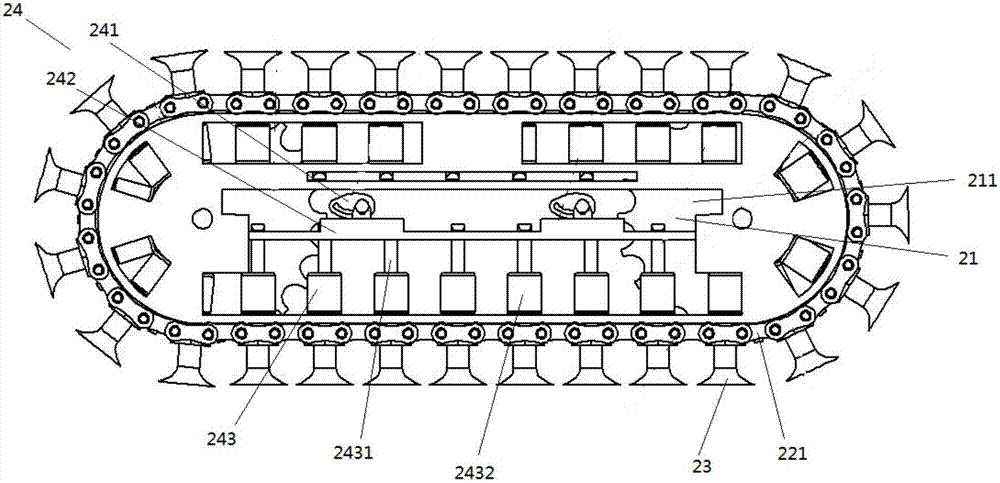
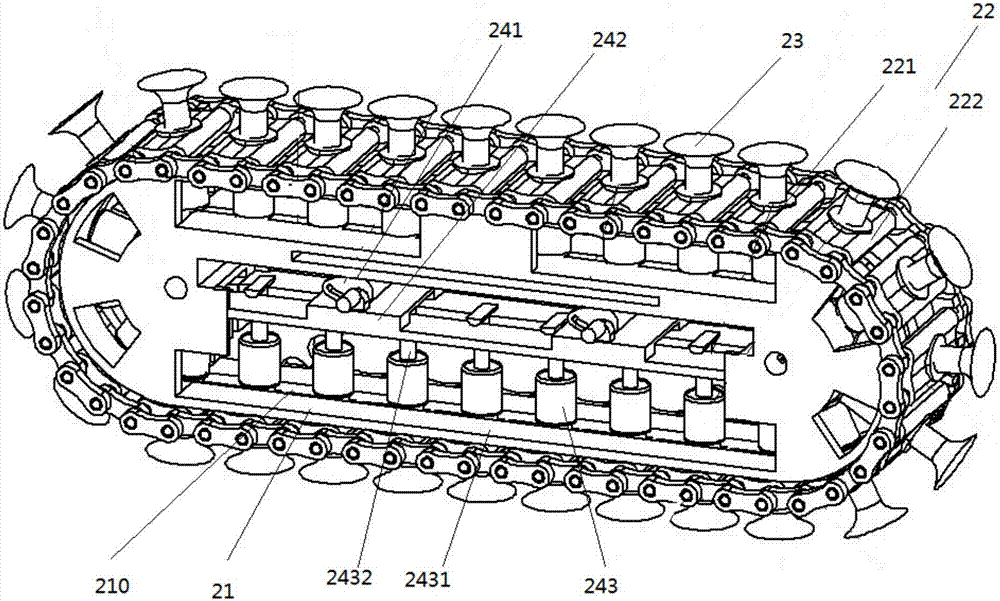
[0028] like Figure 1 to Figure 8 As shown, a chassis support 1, two crawler units 2 and four mechanical foot units 3 are provided according to the inventive spirit of the present invention. The chassis support 1 has two side portions 11 and two end portions 12, wherein the chassis support 1 Each of the side portions 11 of the chassis frame 1 is symmetrically formed on both sides of the chassis frame 1, and each of the end portions 12 of the chassis fram...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com