Wall climbing robot
A robot and drive motor technology, applied in the field of wall-climbing robots, can solve the problems of inconvenient use, poor flexibility, and low efficiency of wall-climbing robots, and achieve the effect of simple structure, good stability, and high moving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
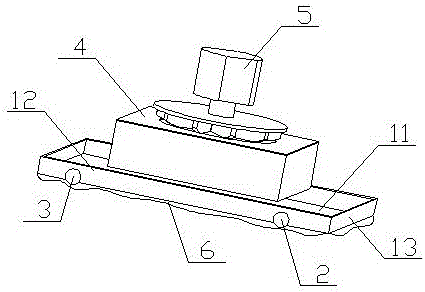
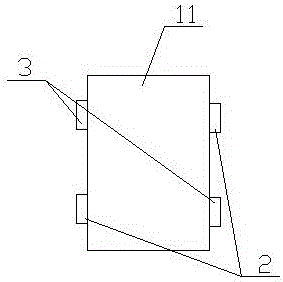
[0013] Example: see figure 1 , figure 2 , a wall-climbing robot includes a chassis, driving wheels 2 and driven wheels 3. The chassis includes a bottom plate 11, two side plates 12 and two end plates 13, and the two side plates 12 and the two end plates 13 are respectively fixedly connected to the two sides and two ends of the chassis. Described driving wheel 2 and driven wheel 3 are two, and two driving wheels 2 and two driven wheels 3 cross and distribute on two side plates 12; A drive motor is respectively installed on both side plates 12, and described drive motor passes The transmission gear is connected with the driving wheel 2 and can drive the driving wheel 2 to rotate. The two driving wheels 2 and the two driven wheels 3 are intersected on the two side plates 12, so that the forward, backward, left, right and rotation of the robot can be realized by controlling the direction of rotation of the motor; the operation is convenient, Walk freely, flexibly, and more eff...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com