Time-sharing separate driving combined drive method
A combined drive and group A technology, applied in the field of robotics, can solve problems such as low walking efficiency, difficult control, and poor obstacle-crossing ability, and achieve high walking efficiency, high obstacle-crossing efficiency, and strong obstacle-crossing ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0025] In order to explain the purpose, technical solutions and features of the present invention more clearly, further description will be given below in conjunction with specific embodiments. This embodiment is only used to better illustrate the present invention, but does not limit the protection scope of the present invention.
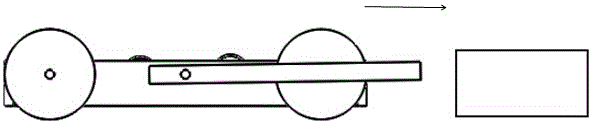
[0026] exist figure 1 In , the three-dimensional structure of the specific example of the robot for a specific application of the present invention is given, and only the relevant parts of the present invention are shown in the figure. The robot structure driven by time-sharing and split-drive combination includes a body (5), four action wheels (1), two auxiliary obstacle barriers (2), four motors (3), a power shaft (4) and four timing belts (6).
[0027] The body (5) adopts a flat structure, four motors (3) are respectively fixed on the body (5), and four action wheels are distributed in two rows on both sides of the body, one pair at the front ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com