Unmanned aerial vehicle sequence image batch processing three-dimensional reconstruction method
A 3D reconstruction and batch processing technology, applied in image data processing, 3D modeling, image enhancement and other directions, can solve the problem that GPS/IMU data cannot meet the requirements of image matching accuracy, accuracy is not high, inaccurate position and attitude information, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
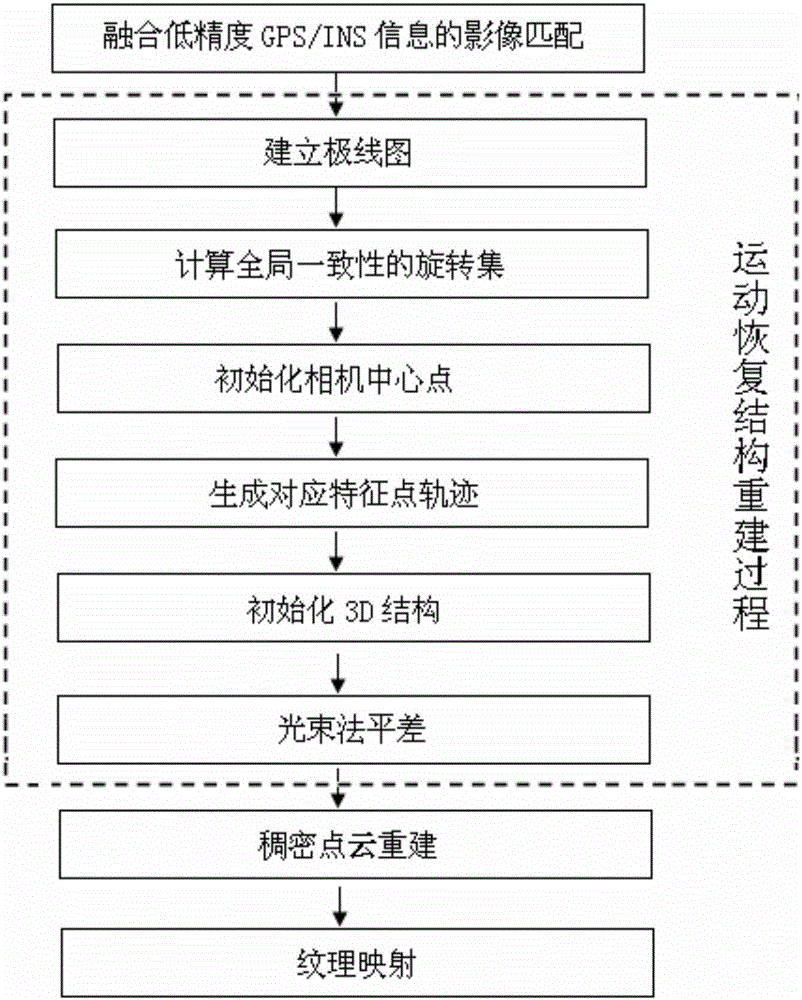
[0069] This embodiment provides a batch processing three-dimensional reconstruction method for UAV sequence images, which will be combined with the following Figure 1-6 The technical solution of the present invention is described in detail.
[0070] Such as figure 1 As shown in Fig. 1, firstly, low-precision GPS / INS information should be integrated to perform image feature matching on sequence images, and then by establishing epipolar maps, calculating globally consistent rotation sets, initializing camera center points, generating corresponding feature point trajectories, initializing 3D structures and Steps such as beam adjustment complete the motion recovery structure reconstruction process, and finally the 3D reconstruction model is obtained through dense point cloud reconstruction and automatic texture mapping.
[0071] The implementation process of the technical solution of the present invention will be described below through specific calculation examples.
[0072] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com